
توضیحات
کنترل مود لغزشی مبتنی بر مشاهده گر اغتشاش خطی برای سیستم های تعلیق فعال با عملگر غیر ایده آل
Linear disturbance observer based sliding mode control for active suspension systems with non-ideal actuator
شبیه سازی در محیط ام فایل و سیمولینک متلب انجام شده است.
دارای ویدیو 14دقیقه ای در مورد شبیه سازی است.
مقدمه
این مقاله مشکل طراحی سیستمهای تعلیق فعال خودرو را در نظر میگیرد که در آن عملگر، تحت تأثیر ناحیه مرده و هیسترزیس، غیر ایدهآل است.
یک روش جدید مبتنی بر یک مشاهده گر اغتشاش همراه با کنترل حالت لغزشی برای جبران اثر عیوب عملگر، عدم قطعیت در پارامترهای تعلیق و یک نمایه جاده ناشناخته پیشنهاد شده است. پایداری برآوردگر اغتشاش و سیستم تعلیق فعال ثابت شده است. عملکرد این طرح با شبیهسازی و آزمایش بر روی یک شبیهسازی آزمایشگاهی سیستم تعلیق یک چهارم خودرو ارزیابی میشود.
توضیحات پروژه کنترل مود لغزشی
در مقاله و در شکل شماره 4 آن دو پروفیل جاده داده شده است. شبیه سازی شامل 4 پوشه است. مثلا برای پروفیل 1 دو پوشه با در نظر گرفتن Dead-zone و Hysteresis هست و برای پروفیل دوم جاده نیز به همین صورت دو پوشه مجزا وجود دارد. همچنین دو پوشه دیگر برای شبیه سازی Dead-zone و Hysteresis با پسیو برای پروفیل یک انجام شده است. در فایل های شبیه سازی فایل سیمولینک مشابه شکل 3مقاله داریم که فایل سیمولینک نیز با نام متناظر آن در پوشه های شبیه سازی وجود دارد( LDO-SMC). و فایل سیمولینک دیگری برای حالت (ATC) مشابه شکل 2 مقاله تهیه شده است.
در همه حالات شبیه سازی با ران کردن یک ام فایل میتوان به نتایج شبیه سازی دست یافت.
در ویدیو سیمولینک ها و شبیه سازی به خوبی توضیح داده شده است.
نتایج شبیه سازی با متلب
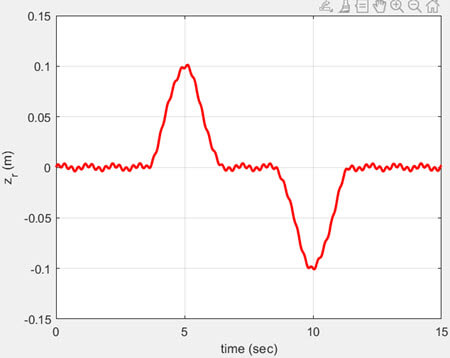
road profile 1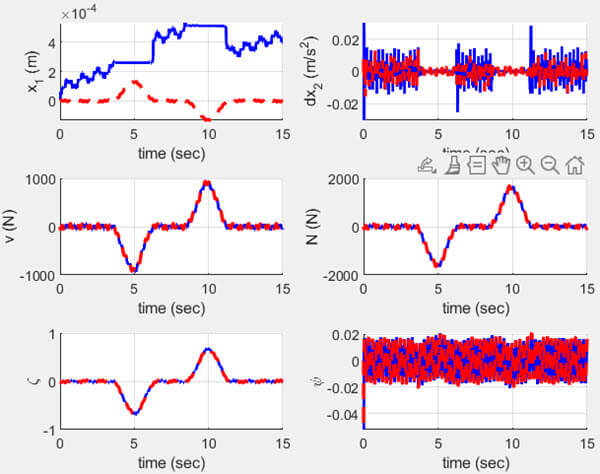
Fig. 5. Simulation results of dead-zone for road profile 1: ATC (blue) and LDO-SMC (dashed dotted red). (a) Sprung mass deflection. (b) Sprung mass acceleration. (c) Control input. (d) Actuator output. (e) RSD. (f) RTF. (For interpretation of the references to colour in this figure legend, the reader is referred to the Web version of this article.)
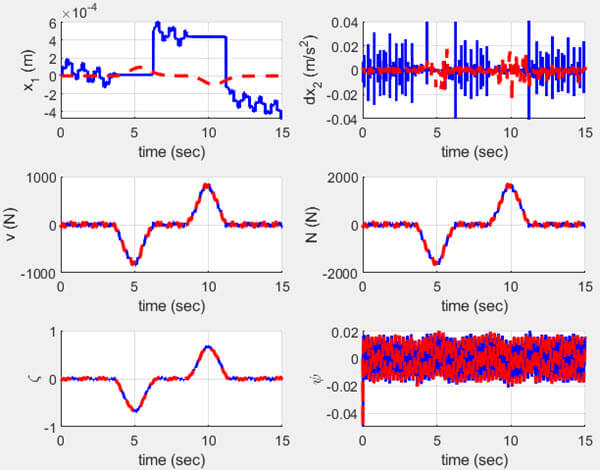
Fig. 6. Simulation results of hysteresis for road profile 1: ATC (blue) and LDO-SMC (dashed dotted red). (a) Sprung mass deflection. (b) Sprung mass acceleration. (c) Control input. (d) Actuator output. (e) RSD. (f) RTF. (For interpretation of the references to colour in this figure legend, the reader is referred to the Web version of this article.)
road profile 1
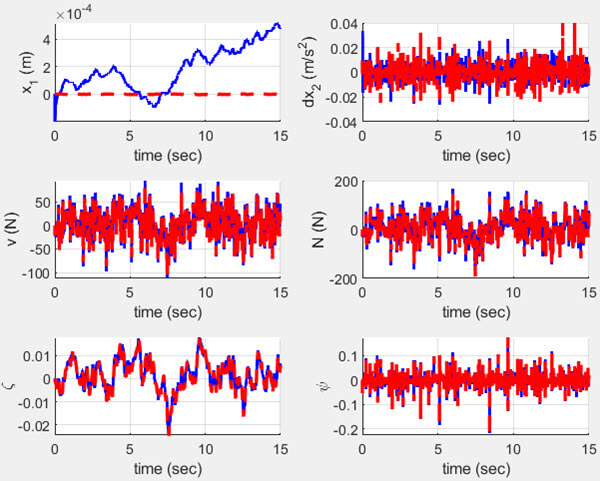
Fig. 7. Simulation results of dead-zone for road profile 2: ATC (blue) and LDO-SMC (dashed dotted red). (a) Sprung mass deflection. (b) Sprung mass acceleration. (c) Control input. (d) Actuator output. (e) RSD. (f) RTF. (For interpretation of the references to colour in this figure legend, the reader is referred to the Web version of this article.)
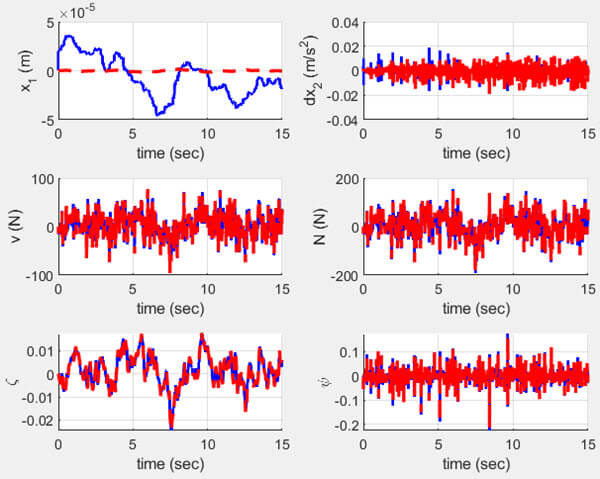
Fig. 8. Simulation results of hysteresis for road profile 2: ATC (blue) and LDO-SMC (dashed dotted red). (a) Sprung mass deflection. (b) Sprung mass acceleration. (c) Control input. (d) Actuator output. (e) RSD. (f) RTF. (For interpretation of the references to colour in this figure legend, the reader is referred to the Web version of this article.)
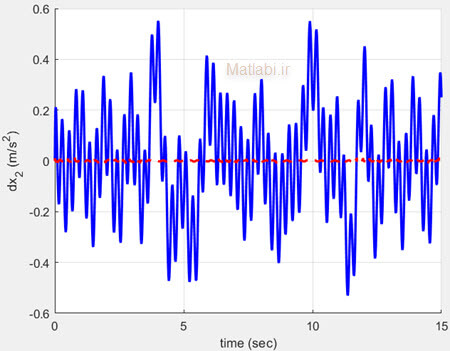
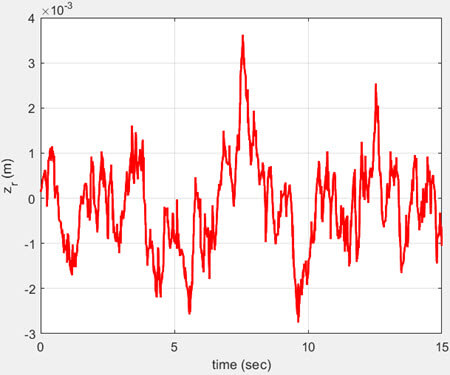
Simulation results of acceleration of sprung mass for road profile 1 with passive Dead-zone
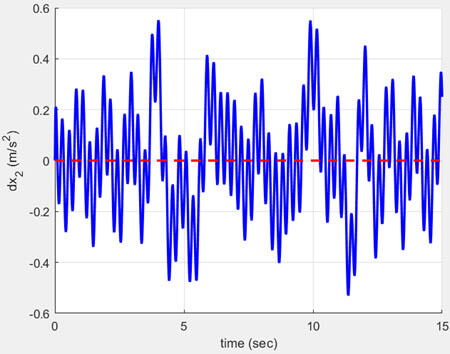
Simulation results of acceleration of sprung mass for road profile 1 with passive Hysteresis
Fig. 9. Simulation results of acceleration of sprung mass for road profile 1 with passive (blue) and active controller (red): (a) Dead-zone; (b) Hysteresis. (For interpretation of the references to colour in this figure legend, the reader is referred to the Web version of this article.)
شاید به موارد زیر نیز علاقه مند باشید:
- کنترل عملکرد سیستم تعلیق خودروها با کنترل PID بر اساس مدل دینامیکی سه بعدی
- کنترلر فیدبک حالت PID از یک سیستم تعلیق خودرو فعال کوارتر
کلیدواژه:
Active suspension system, Actuator non-linearities, Dead-zone, Hysteresis, Disturbance observer, Sliding mode control
سیستم تعلیق فعال, عملگرهای غیرخطی, ناحیه مرده, هیسترزیس, ناظر اغتشاش, کنترل مود لغزشی
شبیه سازی کنترل مود لغزشی مبتنی بر مشاهده گر اغتشاش خطی برای سیستم های تعلیق فعال با عملگر غیر ایده آل
Linear disturbance observer based sliding mode control for active suspension systems with non-ideal actuator
طبق توضیحات فوق توسط کارشناسان سایت متلبی تهیه شده است و به تعداد محدودی قابل فروش می باشد.
سفارش انجام پروژه مشابه
درصورتیکه این محصول دقیقا مطابق خواسته شما نمی باشد،.
با کلیک بر روی کلید زیر پروژه دلخواه خود را سفارش دهید.






دیدگاهها
هیچ دیدگاهی برای این محصول نوشته نشده است.