توضیحات
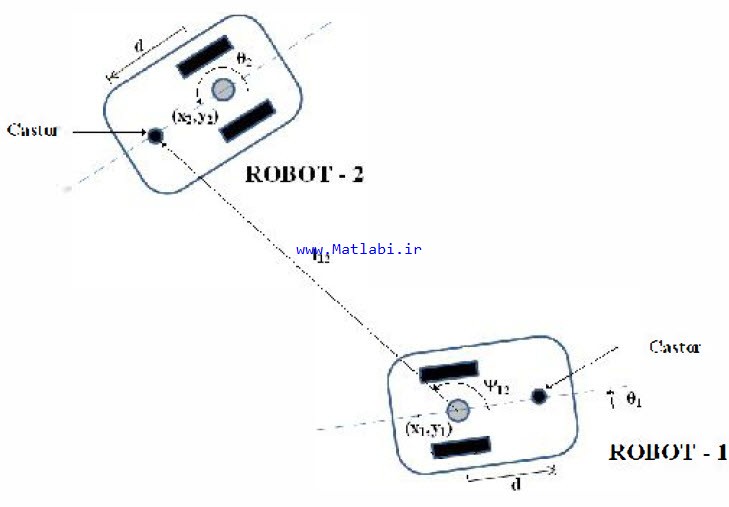
Leader-Follower Formation Control Using Artificial Potential Functions A Kinematic
شبیه سازی در محیط ام فایل متلب انجام شده است.
دارای گزارش فارسی 1 صفحه ای در قالب پی دی اف است.
توضیح پروژه
در مقاله هیچ یک از مقادیر مسئله داده نشده است. به همین دلیل نتایج بصورت دقیق به دست نمی آید.
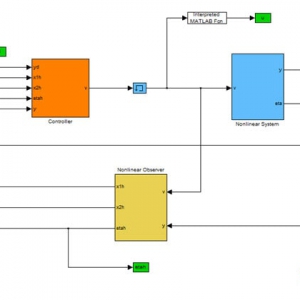
در این پروژه سه ام فایل با متلب تهیه شده است که مربوط به موانع تکی, دوتایی و سه تایی هست.
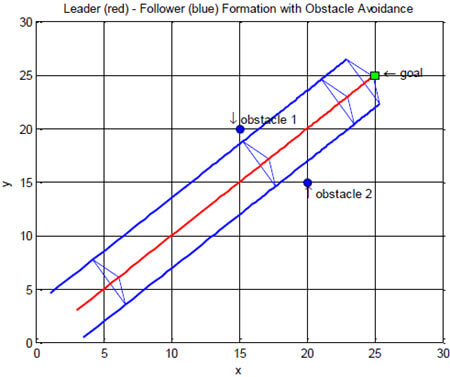
خروجی یکی از برنامه ها برای مثال مشابه شکل زیر است که در آن ربات رهبر قرمز و رباتهای تعقیب کننده آبی هستند.
در چندین snapshot دلخواه نیز فورمیشن دلخواه مثلثی رسم شده است. همچنین محل موانع و هدف نهایی نیز نشان گذاری شده است.
کلیدواژه:
Artificial Potential Field based Navigation, Formation Control, Leader-Follower approach, Tracking Control, پروژه متلب,شبیه سازی بامتلب
شبیه سازی
Leader-Follower Formation Control Using Artificial Potential Functions A Kinematic
توسط کارشناسان سایت متلبی پیاده سازی گردیده و به تعداد محدودی قابل فروش می باشد.
سفارش انجام پروژه مشابه
درصورتیکه این محصول دقیقا مطابق خواسته شما نمی باشد،. با کلیک بر روی کلید زیر پروژه دلخواه خود را سفارش دهید.


دیدگاهها
هیچ دیدگاهی برای این محصول نوشته نشده است.