توضیحات
کنترل مشارکتی لیدر-پیرو USVs با عملکرد تجویز شده و جلوگیری از برخورد
عنوان اصلی مقاله:
Leader–Follower Formation Control of USVs With Prescribed Performance and Collision Avoidance
شبیه سازی در محیط ام فایل متلب انجام شده است.
گزارش بسیار مختصر در حد چند خط دارد.
USVs مختصر وسایل نقلیه سطحی بدون سرنشین است.
مقدمه:
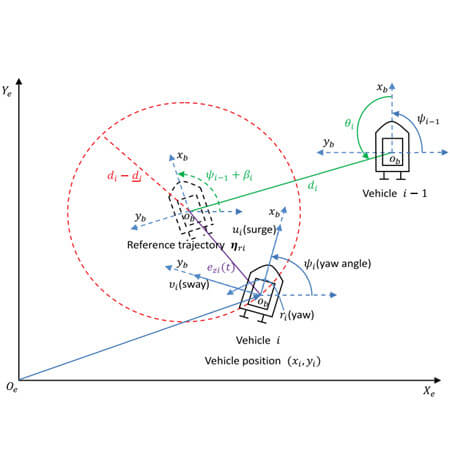
این مقاله یک مسئله کنترل تشکیل غیرمتمرکز برای گروهی از وسایل سطحی بدون سرنشین را مورد بررسی قرار میدهد که در برابر اختلالات زمانمتغیر، عدم قطعیت پارامتری و توابع غیرخطی ناشناخته هستند. هدف کنترل این است که هر وسیله را مجبور به دنبال کردن مسیر مرجع خود کند و برخورد بین هر وسیله و رهبرش را جلوگیری کند. در این مقاله، محدودیتهای عملکرد مشخص، شامل محدودیتهای عملکرد موقتی و پایایی، بر روی خطاهای ردیابی تشکیل در نظر گرفته شدهاند. در طراحی کینماتیک، تکنیک کنترل سطح پویا معرفی شده است تا از استفاده از شتاب وسایل جلوگیری شود. برای جبران عدم قطعیت و اختلالات، تکنیک کنترل تطبیقی برای تخمین پارامترهای ناشناخته از جمله حد بالای اختلالات و تقریبگرهای شبکه عصبی برای تخمین دینامیکهای غیرخطی ناشناخته استفاده شدهاند. در نهایت، یک کنترلکننده تشکیل تطبیقی غیرمتمرکز طراحی شده است که اطمینان حاصل میکند که سیستم بسته حلقه به صورت یکنواخت نهایتا محدود باشد با عملکرد مشخص و برخورد بین هر وسیله و رهبرش را جلوگیری کند. نتایج شبیهسازی کارایی کنترلکننده مشارکتی غیرمتمرکز را نشان میدهند.
توضیحات پروژه کنترل مشارکتی Leader–Follower
شبیه سازی در محیط ام فایل متلب انجام شده است و سه شکل 2 و 3 و 4 مقاله خروجی شبیه سازی است.
در گزارش ورد تمام کد کپی شده و هر بخش آن به صورت مختصر به صورت فارسی توضیح داده شده.
شبیه سازی طوری انجام شده که ترکینگ بخوبی حین اجرای شبیه سازی در شکل 2 مقاله دیده می شود.
نتایج شبیه سازی با متلب:
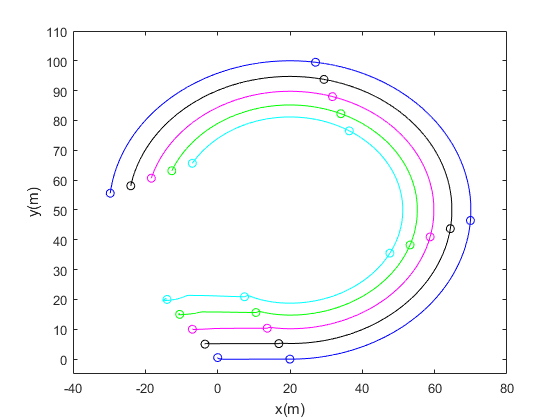
Fig. 2. Phase–plane trajectories of five vehicles and their snapshots at several key time instants
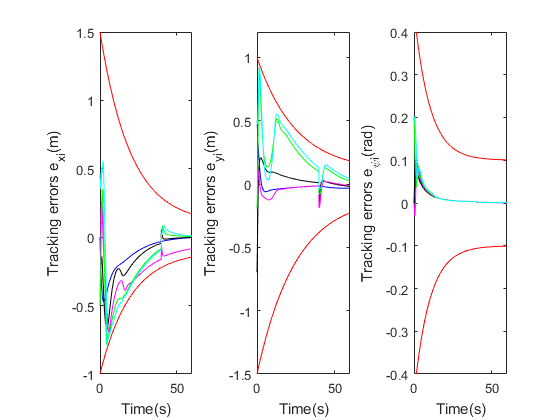
Fig. 3. Evolution of the tracking errors. (a) Evolution of x-direction tracking errors exi(t), along with the performance functions −ex(t) and ex(t).
(b) Evolution of y-direction tracking errors ey i(t), along with the performance functions −ey (t) and ey (t). (c) Evolution of the yaw angle tracking errors eψ i, along with the performance functions −eψ (t) and eψ (t).

Fig. 4. Control inputs. (a) Surge forces τui. (b) Sway forces τυ i. (c) Yaw moments τri
همانطور که مشاهده می شود نتایج مشابه مقاله بدست آمده است.
شاید به موارد زیر نیز علاقه مند باشید:
- کنترل مود لغزشی بهینه برای جلوگیری از برخورد فضاپیما با متلب
- حمل و نقل بار مشارکتی با دو کوادروتور با استفاده از کنترل تطبیقی
-
Adaptive Image-Based Leader–Follower Formation Control of Mobile Robots With Visibility Constraints
- طراحی هدایت میانی موشک برای زاویه برخورد محدود
- کنترل مشارکتی مقاوم به خطا پهپادهای در معرض خطاهای دائمی و متناوب
کلیدواژه:
Collision avoidance, formation control, prescribed performance, unmanned surface vehicles (USVs)
کنترل مشارکتی لیدر-پیرو USVs با عملکرد تجویز شده و جلوگیری از برخورد با متلب
طبق توضیحات فوق توسط کارشناسان سایت متلبی تهیه شده است و به تعداد محدودی قابل فروش می باشد.
سفارش انجام پروژه مشابه
درصورتیکه این محصول دقیقا مطابق خواسته شما نمی باشد،.
با کلیک بر روی کلید زیر پروژه دلخواه خود را سفارش دهید.






دیدگاهها
هیچ دیدگاهی برای این محصول نوشته نشده است.