توضیحات
کد مقاله C120
عنوان مقاله:
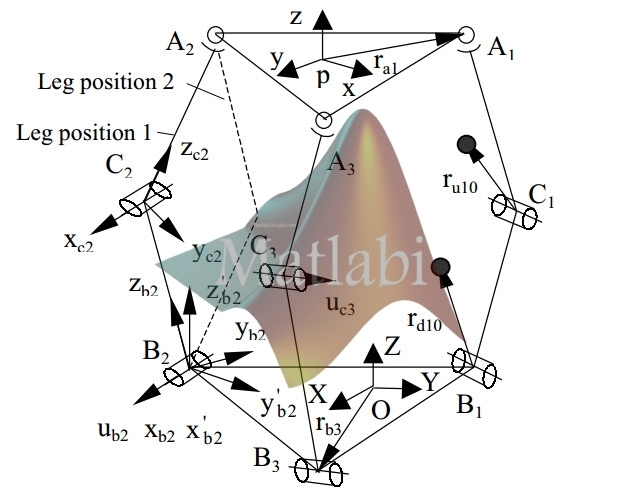
INVERSE KINEMATICS AND DYNAMICS OF THE 3-RRS PARALLEL PLATFORM
سال ارائه: 2001 نوع مقاله: ژورنال گزارش فارسی: دارد
کلید واژه : تحلیل دینامیک معکوس ربات، آنالیز شتاب, پروژه متلب, پروژه matlab , شبیه سازی با متلب
نرم افزار مورد نیاز: متلب
فایلهای نرم افزاری پروژه به صورت ۱۰۰% تست شده و تمامی فایل ها سالم می باشد.
توجه: برای دریافت فایل های شبیه سازی شده با متلب بایستی این محصول خریداری شود.


دیدگاهها
هیچ دیدگاهی برای این محصول نوشته نشده است.