توضیحات
هدایت و کنترل یکپارچه برای موشکهای آشیانه یاب با محدودیت زاویهای پایانه در فضای سهبعدی
عنوان اصلی مقاله:
Integrated Guidance and Control for Homing Missiles with Terminal Angular Constraint in Three Dimension Space
شبیه سازی در محیط ام فایل متلب انجام شده است.
دارای گزارش ورد 3 صفحه ای در قالب ورد است.
توضیحات پروژه هدایت و کنترل موشک هومینگ
مقاله کنفرانسی است و در آن تمام نکات توضیح داده نشده. بنابراین، بعضی کارهای تخمینی انجام شده را توضیح می دهم (با رنگ قرمز).
شبیه سازی را با فایل main میتوان اجرا کرد. در زیر بخش هایی از گزارش آورده شده است:
در خط 10 تا 14 مقادیر اولیه متغیرهای حالت داده شده است. بعضی از این مقادیر اولیه در مقاله موجود نبود و بنابراین مقدار صفر برایشان قرار داده شد.
خط 17: شبیه سازی دو بار اجرا می شود که هر کدام متناسب با یکی از case های مقاله است.
خطوط 27 تا انتها هم نتایج است.
فایل missile model
خطوط 12 تا 17: ثابت های مرتبط با کنترلر که مقادیرشان در مقاله آمده است.
خطوط 23 و 24: مقادیر مرجع زوایا.
خط 34: شتاب کلی جسم هدف. این فرمول در مقاله نیامده و به صورت تخمینی نوشته شده است.
خط 35: مقادیر عدم قطعیت ها که در مقاله فرمولش داده نشده و بنابراین صفر قرار داده شد.
خطوط 53 تا 54: معادلات M1 و M2 که روابطشان داخل مقاله است.
از خط 56 تا انتها: شماره فرمول به صورت کامنت نوشته شده است (داخل پرانتز).
در بالا بخشی از توضیحات گزارش مربوط به این پروژه متلب آورده شده است.
نتایج شبیه سازی با متلب
شکل های برخورد موشک و هدف در ادامه آورده می شود. ملاحظه می شود که نتایج بسیار شبیه مقاله هستند. البته مقاله هیچ کدام از فرمول های مربوط به مختصات موشک و هدف را نداده است.

Fig. 2 Movement curves with case 1
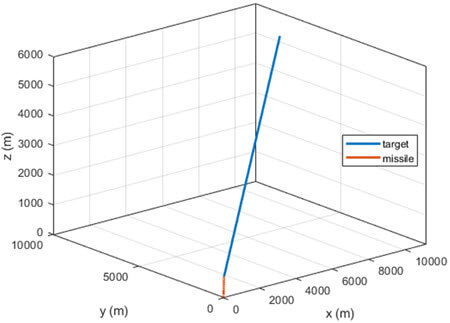
Fig. 3 Movement curves with case 2
شکل همگرایی زوایا: ملاحظه می شود همچون مقاله هر دو زاویه بسیار خوب به مقادیر مرجع خود همگرا شده اند.

Fig. 4 Curve graph of LOS angle
شکل ورودی کنترلی: ملاحظه می شود که مقادیر همچون مقاله در بازه مطلوب هستند و در زمان برخورد دو جسم، یک واگرایی ایجاد شده است:
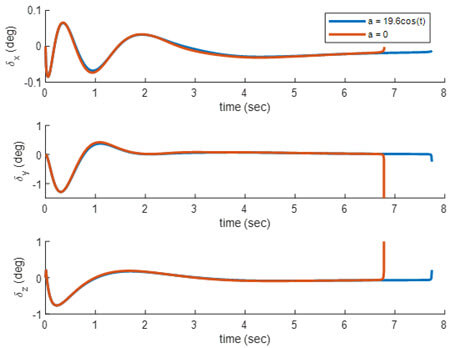
Fig. 5 Curve graph of fin deflections
شاید به موارد زیر نیز علاقه مند باشید:
- یک شارژر باتری دو جهته با مدار یکسان سازی شارژ یکپارچه مدولار
- ساختار هدایت و کنترل برای هلیکوپترهای چهار روتوره کنترلر غیر خطی
- یک کنترلر پیش بین مدل تثبیت کننده برای تنظیم ولتاژ مبدل بوست DC/DC
- مدل کنترل پیش بین برای ربات سایز کوچک همه جهته با محدودیت موتور و عدم لغزش
- راهنمای تصویری سوزن های انعطاف پذیر نوک هدایت شونده
کلیدواژه:
Adaptive multiple sliding surface control, backstepping, 3D-IGC, terminal angular constraint
کنترل مودلغزشی چندگانه تطبیقی, 3D-IGC, محدودیت زاویه ای ترمینال
هدایت و کنترل یکپارچه برای موشکهای آشیانه یاب با محدودیت زاویهای پایانه در فضای سهبعدی با متلب
طبق توضیحات فوق توسط کارشناسان سایت متلبی تهیه شده است و به تعداد محدودی قابل فروش می باشد.
سفارش انجام پروژه مشابه
درصورتیکه این محصول دقیقا مطابق خواسته شما نمی باشد،.
با کلیک بر روی کلید زیر پروژه دلخواه خود را سفارش دهید.






دیدگاهها
هیچ دیدگاهی برای این محصول نوشته نشده است.