توضیحات
H∞ output tracking control for a class of switched LPV systems and its application to an aero‐engine model
کنترل ردیابی خروجی H بینهایت برای یک کلاس از سیستم های LPV سوئیچ شده و کاربرد آن در یک مدل موتور هوا
شبیه سازی در محیط ام فایل متلب انجام شده است.
دارای گزارش ورد 9 صفحه ای است.
از تولباکس های Yalmip و Sedumi استفاده شده است.
چکیده مقاله
هدف این مقاله بررسی مشکل کنترل ردیابی خروجی H بینهایت برای یک کلاس از سیستمهای متغیر خطی متغیر (LPV) است.
یک شرط کافی برای اطمینان از عملکرد ردیابی خروجی H بینهایت برای یک سیستم LPV سوئیچ شده ابتدا در قالب نابرابری های ماتریس خطی ارائه می شود.
سپس، مجموعهای از سیگنالهای سوئیچینگ وابسته به پارامتر و حالت طراحی میشوند و خانوادهای از کنترلکنندههای LPV سوئیچشونده از طریق عملکردهای لیاپانوف چندگانه وابسته به پارامتر برای افزایش انعطافپذیری طراحی کنترل توسعه مییابند.
حتی اگر مشکل کنترل ردیابی خروجی H بینهایت برای هر زیرسیستم غیرقابل حل باشد، مشکل سیستم های LPV سوئیچ شده هنوز توسط کنترل کننده های طراحی شده و قانون سوئیچینگ طراحی شده حل می شود.
در نهایت، اثربخشی طرح طراحی کنترل پیشنهادی با کاربرد آن در مسئله تنظیم سرعت Hبینهایت یک موتور هوا نشان داده شده است.
توضیحات پروژه کنترل ردیابی خروجی اچ بی نهایت برای سیستم LPV سوییچ شده
فایل های altitude_data و mach_data این دو فایل شامل داده های ارتفاع و عدد ماخ هستند که از شکل 4 مقاله گرفته شده است. در مقاله ذکر شده است که این دو پروفیل در این شبیه سازی انتخاب شده اند. لذا از داده های آن ها در شبیه سازی استفاده کردیم.
در گزارش این پروژه ام فایل ها و کدهای برنامه تشریح شده اند. نمونه ای از آن را در زیر آورده ایم:
فایل switching_lpv_control
روش LMI توضیح داده شده در Theorem 2 در مقاله در این قسمت پیاده سازی شده است و خروجی آن ضریب کنترلر می باشد.
خطهای 3 تا 5: تعیین ماتریس های سیستم.
خطوط 8 تا 12: تعیین متغیرهای LMI طبق توضیحات مقاله.
خط 15 تا 17: خطوط زیر معادله 26 مقاله.
…
توضیح کدهای برنامه به سبک بالا در فایل ورد آورده شده است.
شاید به موارد زیر نیز علاقه مند باشید:
- طراحی یک کنترلر با H بی نهایت
- شبکه عصبی مبتنی بر کنترل هیبرید برای رویکرد H بی نهایت سیستم رباتیک
- ردیابی بهینه و کنترل مقاوم توان توربین بادی DFIG
- Optimal Linear Quadratic Regulator of Switched Systems
- شبیه سازی یک موتور 64 سوئیچ رلوکتانس بر اساس محیط Matlab Simulink
نتایج شبیه سازی با متلب
با اجرای فایل main نتایج زیر حاصل می گردد. زمان اجرا قدری طولانی است. ملاحظه می شود نمودارهای به دست آمده نتایج مقاله را نشان می دهند. البته قدری تفاوت بین ظاهر آن ها وجود دارد ولی نتیجه گیری کلی یکی است.
شکل 4
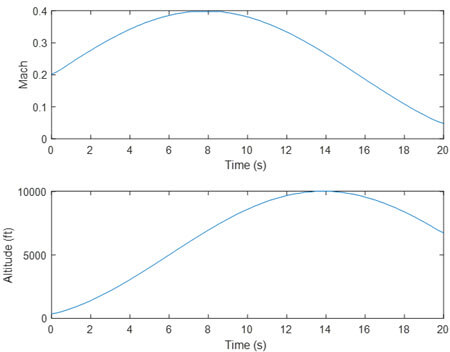
The trajectories of the Mach number and the altitude.
شکل 5و8
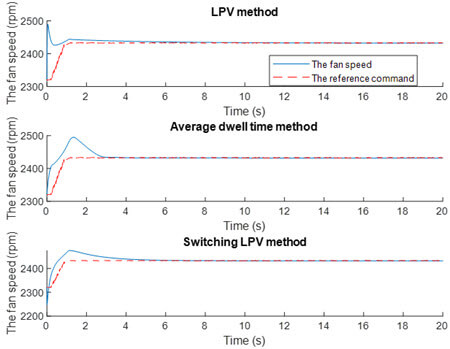
The fan speed. LPV, linear parameter varying.
The fan speed and the reference command. LPV, linear parameter varying.
شکل9
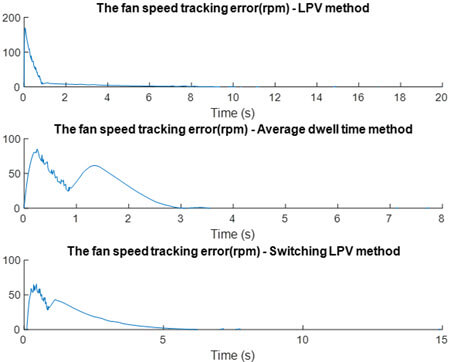
The H∞ fan speed tracking error. LPV, linear parameter varying.
شکل 3
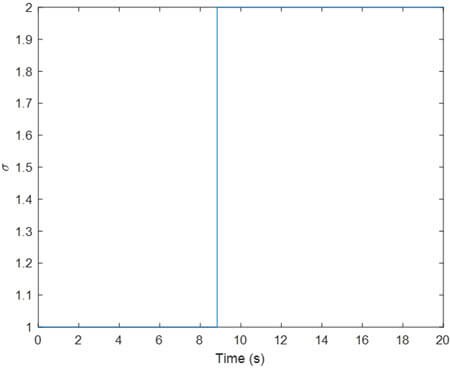
The switching signals.
شکل 7
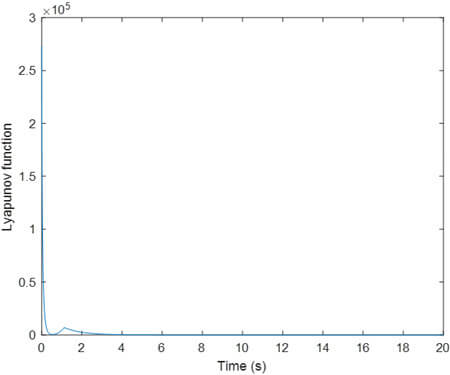
The Lyapunov function
کلیدواژه:
switched linear parameter-varying system, H∞ output tracking control, parameter and mode-dependent switching signal, multiple parameter-dependent Lyapunov functions, aeroengine control
شبیه سازی کنترل ردیابی خروجی H بی نهایت برای یک کلاس از سیستم های LPV سوئیچ شده و کاربرد آن در یک مدل موتور هوا
طبق توضیحات فوق توسط کارشناسان سایت متلبی تهیه شده است و به تعداد محدودی قابل فروش می باشد.
سفارش انجام پروژه مشابه
درصورتیکه این محصول دقیقا مطابق خواسته شما نمی باشد،.
با کلیک بر روی کلید زیر پروژه دلخواه خود را سفارش دهید.






دیدگاهها
هیچ دیدگاهی برای این محصول نوشته نشده است.