توضیحات
Global Adaptive Dynamic Programming for Continuous-Time Nonlinear Systems
برنامه نویسی دینامیک تطبیقی عمومی برای سیستم های غیرخطی مداوم (با پیوستگی زمانی)
شبیه سازی در محیط ام فایل متلب انجام شده است.
دارای گزارش ورد 7 صفحه ای می باشد.
صفحه اصلی مقاله در IEEE
ترجمه چکیده مقاله
در این مقاله یک روش جدید از برنامه نویسی دینامیکی انطباقی جهانی (ADP) برای کنترل بهینه تطبیقی سیستم های چند جمله ای غیرخطی ارائه شده است.
این استراتژی شامل آرامش بخشیدن به مسئله حل معادله همیلتون-ژاکوبی-بلمن (HJB) به یک مسئله بهینه سازی است ، که با روش تکرار یک سیاست جدید حل می شود.
روش پیشنهادی از روشهای غیر خطی شناخته شده قبلی متمایز است که از تقریب شبکه عصبی جلوگیری می کند و باعث بهبود قابل توجه محاسبات می شود. به جای تثبیت نیمه عمومی یا موضعی ، سیاست کنترل حاصله در سطح عمومی برای یک کلاس کلی از سیستم های چند جمله ای غیرخطی تثبیت می شود.
علاوه بر این ، در غیاب دانش پیشینی پویایی سیستم ، یک روش یادگیری آنلاین ابداع شده است تا با تعمیم تئوری فعلی ADP ، روش تکرار سیاست پیشنهادی را پیاده سازی کند. در آخر ، سه مثال عددی برای تأیید اثربخشی روش پیشنهادی ارائه شده است.
توضیحات پروژه
شبیه سازی شامل سه بخش هست که در پوشه های جداگانه قرار گرفته اند. تمامی آنها فقط با اجرای یک ام فایل قابل ران هستند.
برای اجرای این شبیه سازی نیاز به نصب ابزارهایی هست که در گزارش کار این پروژه, در مورد نصب آن توضیح داده شده است.
ابزارهای مورد نیاز شبیه سازی که عبارتند از حلگر sedumi و نیز ابزار cvx به همراه فایلهای پروژه در پوشه requiredtools قرار داده شده اند.
سه شبیه سازی موجود در مقاله، در پوشه هایی متناظر با شماره خود در مقاله در پوشه simulation قرار دارند.
پس از اجرای شبیه سازی، جدولی ظاهر میگردد. با انتخاب شماره مورد نظر و انتخاب Yes، آن شبیه سازی حل شده و نمودارها نمایش داده میشوند.
محصولات سایت متلبی دارای پشتیبانی رایگان بابت اجرا می باشند.
کاربرد هر تابع در ابتدای آن نوشته شده است.
با اجرای شبیه سازی سازی نتایج زیر حاصل می شود. ملاحظه می نمایید که نمودارها با تقریب بالایی مانند مقاله هستند (به اعداد روی محورها توجه نمایید).
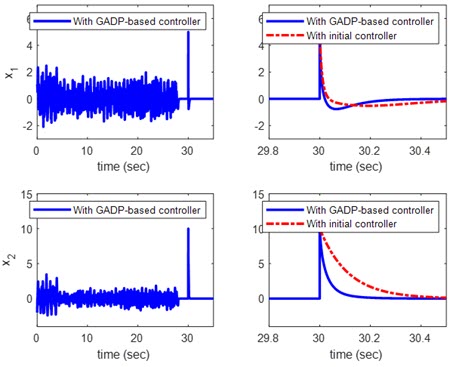
مثال 1
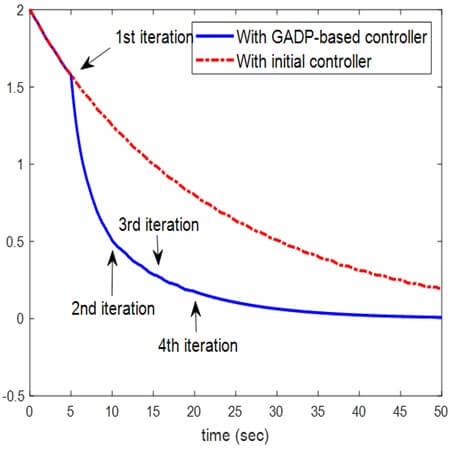
System state trajectory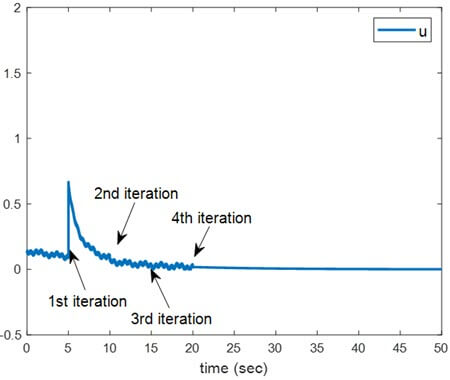
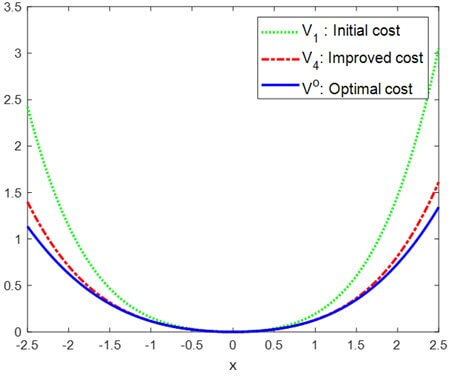
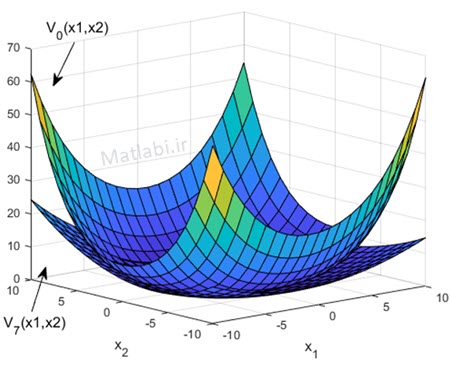
Comparison of the value functions
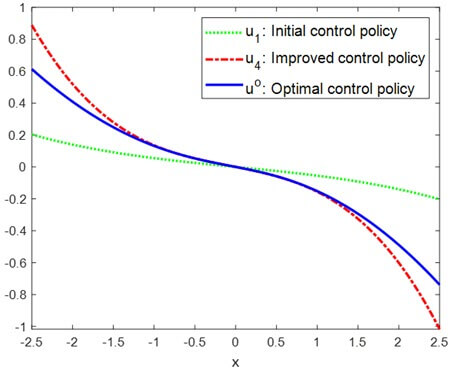
Comparison of the control policies
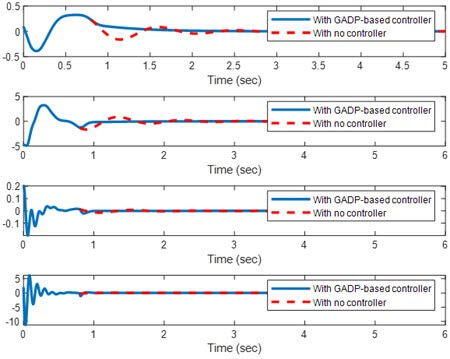
مثال 2
System trajectories
Comparison of the cost functions
مثال 3
Post-learning performance
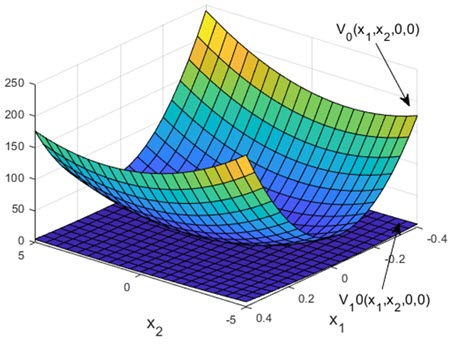
Comparison of the cost functions
- انجام پروژه شبکه عصبی با متلبی
کلیدواژه:
Adaptive dynamic programming, nonlinear systems, optimal control, global stabilization
شبیه سازی
Global Adaptive Dynamic Programming for Continuous-Time Nonlinear Systems
طبق توضیحات فوق توسط کارشناسان سایت متلبی تهیه شده است و به تعداد محدودی قابل فروش می باشد.
سفارش انجام پروژه مشابه
درصورتیکه این محصول دقیقا مطابق خواسته شما نمی باشد،.
با کلیک بر روی کلید زیر پروژه دلخواه خود را سفارش دهید.






نیما عزیزالهی –
کد بسیار تمیز و کامنت گذاری های خوبی برای درک برنامه داره. فقط کاش گزارش بهتری داشت. سپاس متلبی