توضیحات
Fuzzy unknown observer-based robust adaptive path following control of underactuated surface vehicles subject to multiple unknowns
شبیه سازی در محیط ام فایل متلب انجام شده است.
دارای گزارش 7 صفحه ای در قالب ورد است.
توضیحات پروژه
شبیه سازی در دو پوشه به نام های line path و point path تهیه و قرار گرفته اند. در پوشه اول مسیری که مقاله به صورت خط استفاده کرده است، به کار میرود و در پوشه مسیر نقطه ای قرار دادیم.
به دلیل منطبق بودن کدهای پوشه اول با مقاله (و نیز مقایسه جوابهای به دست آمده با مقاله)، به توضیحات کدهای داخل این پوشه میپردازیم و سپس نحوه به کار گرفتن مسیر نقطه ای را در پوشه دوم بیان مینماییم. (برای مسیر نقطه ای زمان شبیه سازی قدری بیشتر است).
در اینجا فقط بخشی از توضیحات گزارش کار را جهت رویت خریدار قرار می دهیم:
وارد پوشه line path میشویم. سه کد به صورت زیر وجود دارند:
کد inputs: ورودی های مساله طبق بخش شبیه سازی مقاله.
کد usvEquations_FUORAPFC: کدهای معادلات وسیله و نیز کنترلر فازی در این قسمت آورده شده است.
- خط 14 تا 29: نام متغیرهای حالت
- خط 32 تا 34: اجرای بخش فازی با خواندن دستورات داخل فایل fis که خروجی آن متغیرهای نامعلوم معادله (24) که در (29) و (38) استفاده شده است. دقت نمایید مقاله توضیحی در مورد قوانین فازی و ورودی ها و خروجی ها و بازه آن ها نداده بود (توابع عضویت را توضیح نداده است) در نتیجه برنامه نویس یک مدل فازی درست کرده است. با اجرای شبیه سازی متوجه میشوید که پاسخهای شبیه سازی و مقاله به هم نزدیکند.
نتایج برای روش ارائه شده در مقاله (نمودارهای سبز و قرمز) به دست می آیند. برای نمودارهای آبی توضیحی در مقاله داده نشده است و صرفا برای مقایسه آورده شده است.
ملاحظه میشود که نتایج به دست آمده تا حد زیادی شبیه به مقاله هستند و تفاوتها هم به دلیل عدم توضیح مقاله در مورد جزئیات بخش فازی است
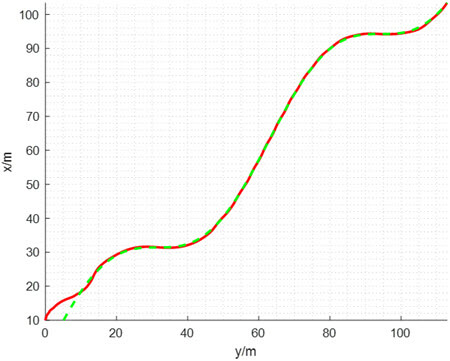
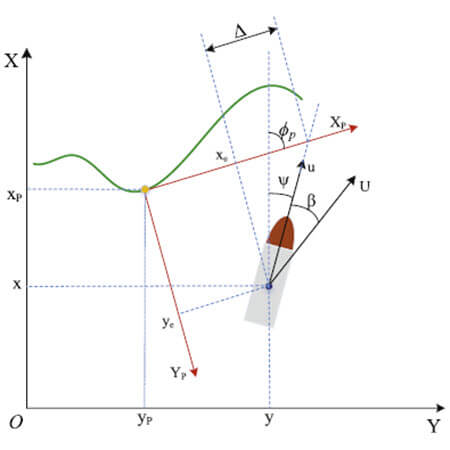
Path following performance

Cross- and along-track errors
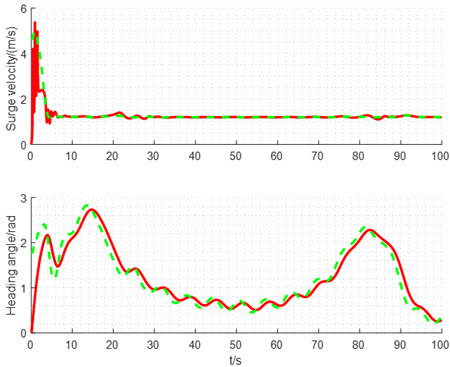
Surge speed and heading angle tracking

Surge and heading tracking errors
Uncertainty observation errors

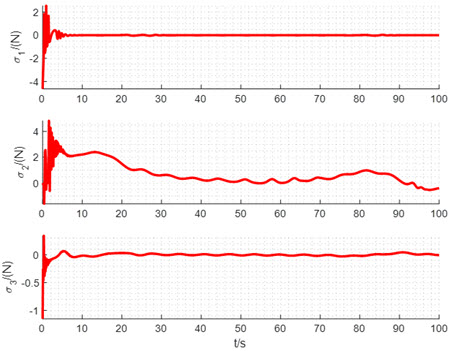
Control inputs
فایل main در پوشه دوم:
در این فایل پس از خواندن فایل .mat شامل نقاط، در حین شبیه سازی با میان یابی مقادیر X و Y و T متناظر با هر زمان به دست می آید. فرض شده هر 2 ثانیه یک داده جدید وارد میشود و تعداد 105 داده وجود دارد، برای همین کل زمان شبیه سازی 200 ثانیه است.
کلیدواژه:
Surge-guided line-of-sight guidance, Path following control, Underactuated surface vehicle, Fuzzy unknown observer
شبیه سازی
Fuzzy unknown observer-based robust adaptive path following control of underactuated surface vehicles subject to multiple unknowns
طبق توضیحات فوق توسط کارشناسان سایت متلبی تهیه شده است و به تعداد محدودی قابل فروش می باشد.
سفارش انجام پروژه مشابه
درصورتیکه این محصول دقیقا مطابق خواسته شما نمی باشد،.
با کلیک بر روی کلید زیر پروژه دلخواه خود را سفارش دهید.






دیدگاهها
هیچ دیدگاهی برای این محصول نوشته نشده است.