توضیحات
Fuzzy-Model-Based Sliding Mode Control of Nonlinear Descriptor Systems
شبیه سازی در محیط ام فایل متلب انجام شده است.
دارای گزارش 11 صفحه ای در قالب ورد است.
توضیحات پروژه
فایل های شبیه سازی به سه دسته و پوشه تقسیم شده اند.
پوشه 1 مربوط به کنترلر فازی تنها است.
پوشه 2 مربوط به کنترلر فازی SMC است.
پوشه 3 مربوط به کنترلر SMC در حالتی است که طبق گفته مقاله حدود بالا و پایین معلوم نیستند.
در گزارش این پروژه توضیحات در مورد خطوط برنامه داده شده است.
بطور مثال:
خطوط 68 تا 70: معادله دیفرانسیل s طبق معادله 26 مقاله.
نتایج شبیه سازی با متلب
مشاهده میشود که نمودارها شباهت زیادی به نمودارهای مقاله دارند. هر چند تفاوتهایی ممکن است در ظاهرشان وجود داشته باشد ولی روند کلی و بازه تغییرات تقریبا برابر است. در شکلهای به دست آمده همچون مقاله با افزایش پارامتر MU از 3 به 10 نتایج از حالت مطلوب فاصله گرفته اند (هر چند در مقاله نتایج به مقدار زیادی بهم ریختند ولی در شبیه سازی نتایج بهتری به دست آمدند).
تصاویر زیر خروجی شبیه سازی هستند و با نام معادل در مقاله نامگذاری شده اند تا براحتی قابل تشخیص باشند.
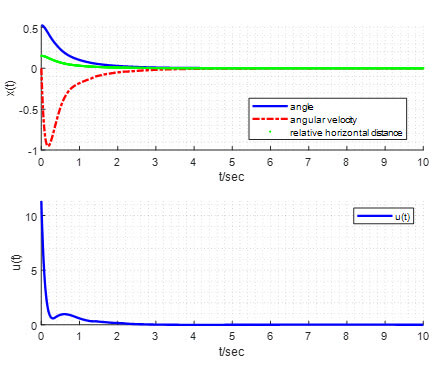
Fig. 2. Responses of system with small matched uncertainty under fuzzy controller (43).
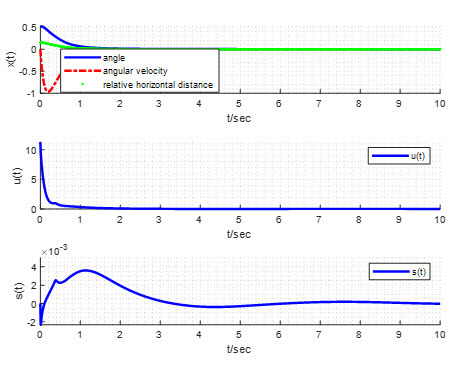
Fig. 3. Responses of system with small matched uncertainty under fuzzy SMC controller (42).

Fig. 4. Responses of system with big matched uncertainty under fuzzy controller (43).
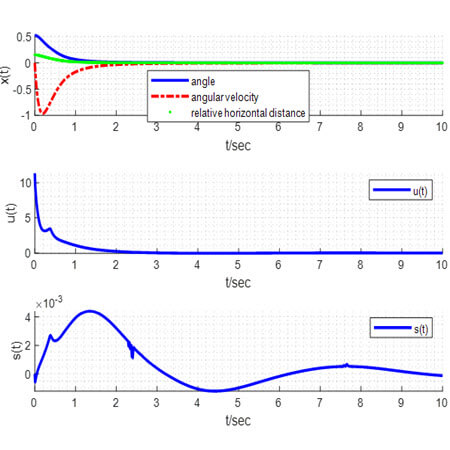
Fig. 5. Responses of system with big matched uncertainty under fuzzy SMC controller (42).
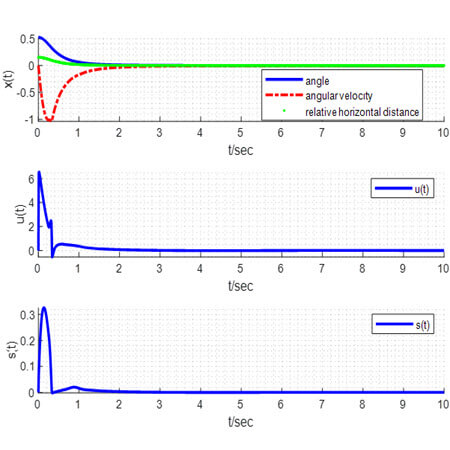
Fig. 6. System responses under adaptive SMC law (44).
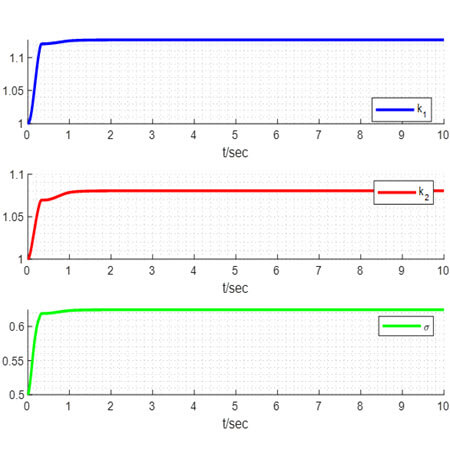
Fig. 7. Estimated parameters ˆκ1, ˆκ2, and ˆσ .
کلیدواژه:
Dissipativity, fuzzy descriptor systems, fuzzy switching manifold, sliding mode control (SMC), time delay
شبیه سازی Fuzzy-Model-Based Sliding Mode Control of Nonlinear Descriptor Systems
طبق توضیحات فوق توسط کارشناسان سایت متلبی تهیه شده است و به تعداد محدودی قابل فروش می باشد.
سفارش انجام پروژه مشابه
درصورتیکه این محصول دقیقا مطابق خواسته شما نمی باشد،.
با کلیک بر روی کلید زیر پروژه دلخواه خود را سفارش دهید.






دیدگاهها
هیچ دیدگاهی برای این محصول نوشته نشده است.