
توضیحات
Fuzzy bang-bang relay controller for satellite attitude control system
برای سیستم خطی شده ، یک کنترل کننده LQR طراحی شده. سپس عملکرد کنترل کننده را روی سیستم غیر خطی بررسی کرده و در پایان نیز مقاومت کنترل کننده را در مقابل نویز اندازه گیری و اغتشاش ورودی ( پله واحد) بر سیستم غیر خطی بررسی کردیم.
نتایج بدست آمده از شبیه سازی با متلب:
مدل سازی در سیمولینک و m-file
تحلیلات سیستم:
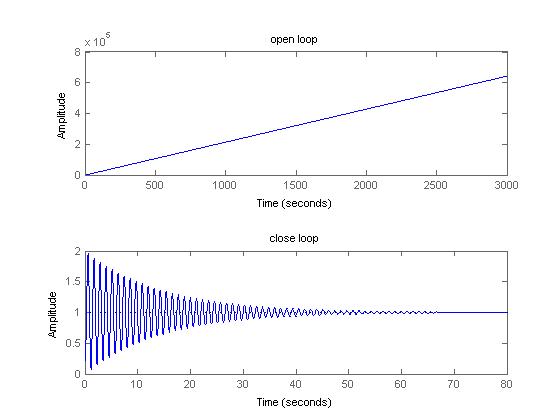
پاسخ پله حلقه باز و حلقه بسته سیستم
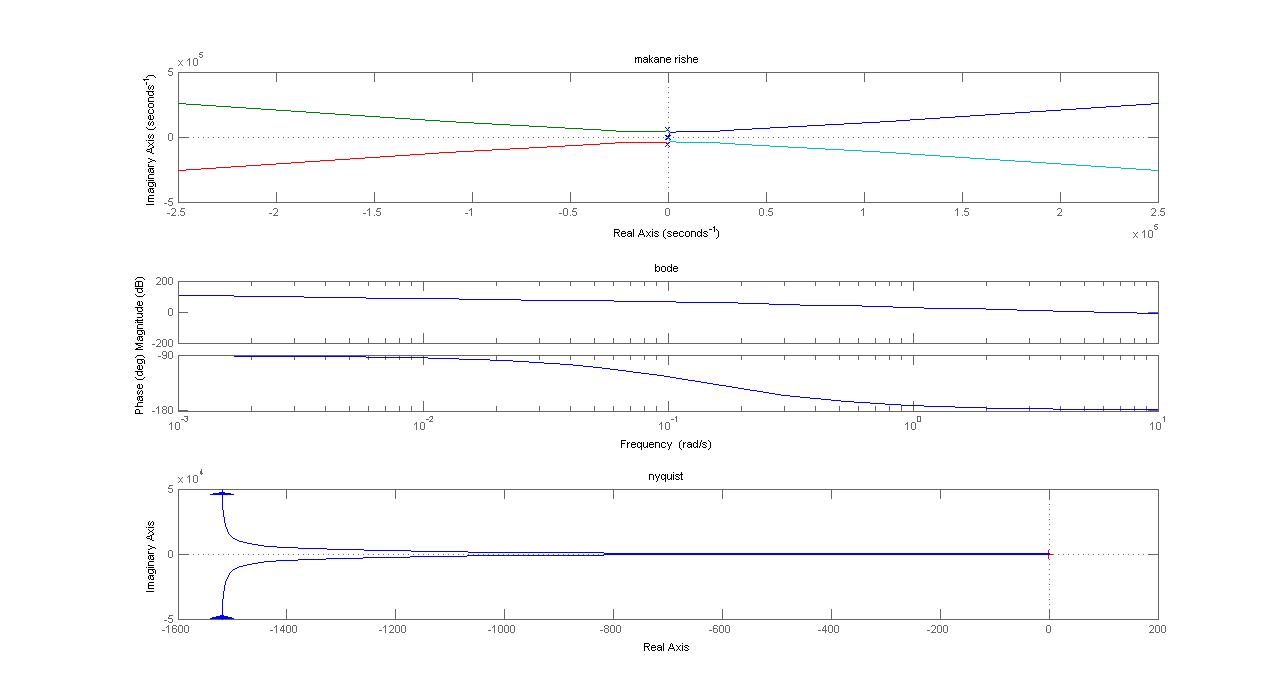
تحلیل بود نایکویست مکان ریشه
استفاده از کنترلر PID برای بهبود کنترل سیستم:
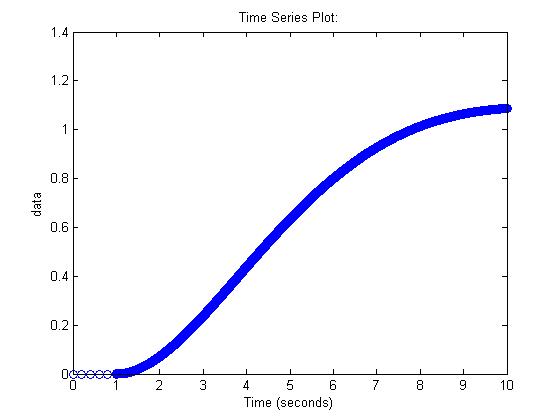
با کنترلر pid تنظیم شده یعنی کنترلری که بهترین کنترلر pid است جواب بالا بدست آمد که سرعت پایین و خطای ماندگار در حد .1 دارد
با استفاده از کنترلر فازی:
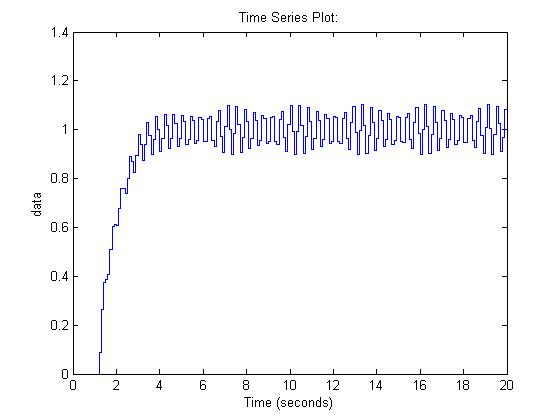
کنترلر فازی نسبت به pid بهتر است از این جهت که سرعت سیستم بهتر شده و خطا در حد همان .1 است.
پروژه کنترل بهینه، پروژه متلب,شبیه سازی بامتلب
Bang-bang; Slide mode control; Fuzzy logic control; State dependent Riccati equation
شبیه سازی
Fuzzy bang-bang relay controller for satellite attitude control system
برای سیستم خطی شده ، یک کنترل کننده LQR طراحی شده. سپس عملکرد کنترل کننده را روی سیستم غیر خطی بررسی کرده و در پایان نیز مقاومت کنترل کننده را در مقابل نویز اندازه گیری و اغتشاش ورودی ( پله واحد) بر سیستم غیر خطی بررسی کردیم.
توسط کارشناسان سایت متلبی پیاده سازی گردیده و به تعداد محدودی قابل فروش می باشد.
سفارش انجام پروژه مشابه
درصورتیکه این محصول دقیقا مطابق خواسته شما نمی باشد،. با کلیک بر روی کلید زیر پروژه دلخواه خود را سفارش دهید.






دیدگاهها
هیچ دیدگاهی برای این محصول نوشته نشده است.