توضیحات
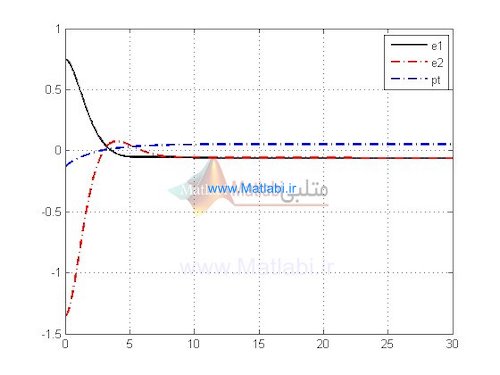
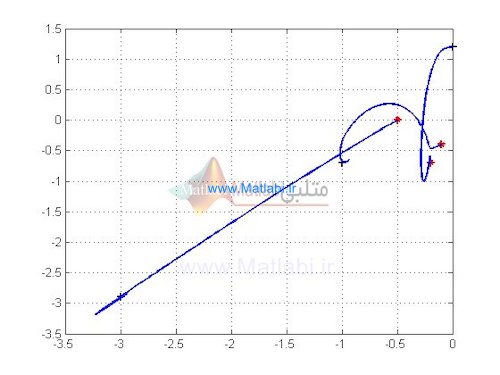
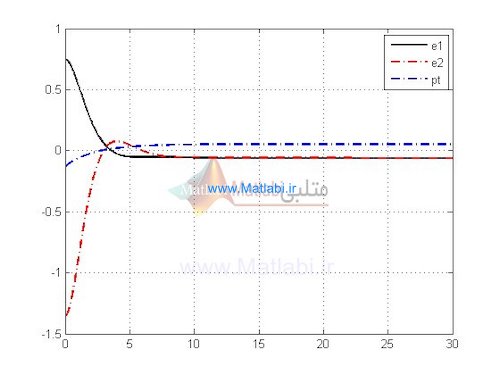
Formation control and collision avoidance for multi-agent systems based on position estimation
کلیه سناریوهای شبیه سازی مقاله پیاده سازی شده است.
دارای یک صفحه گزارش در قالب ورد است.
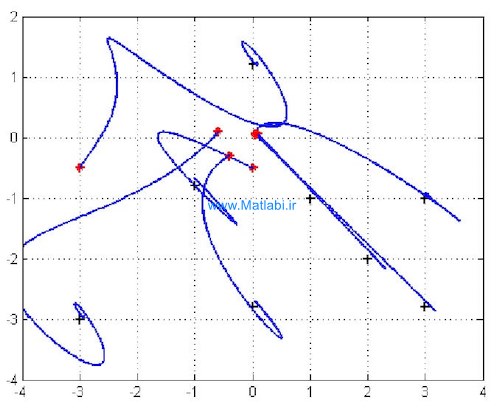
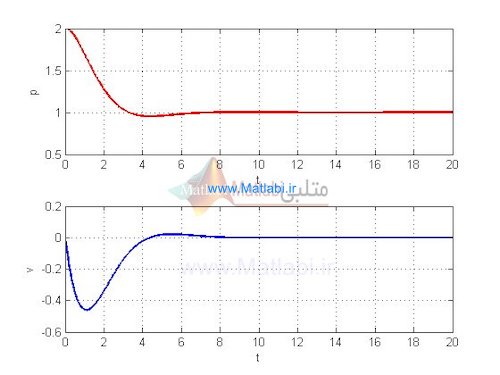
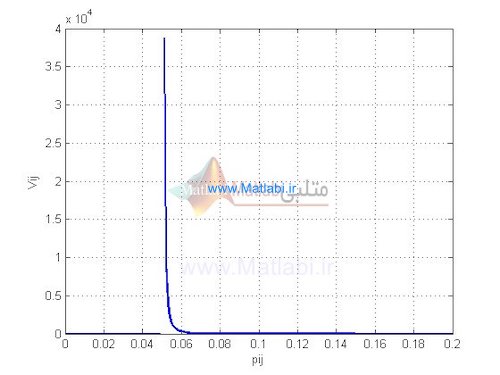
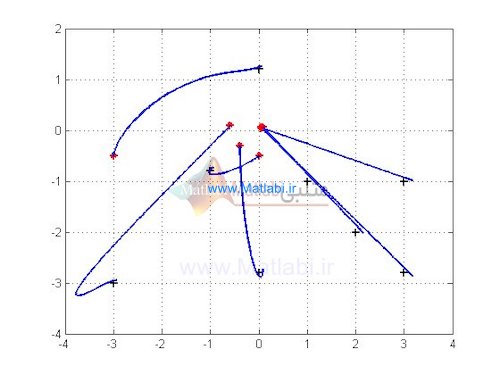
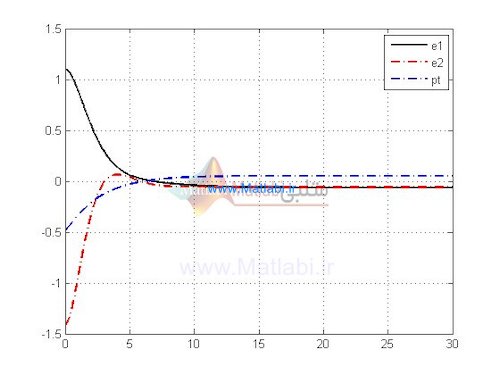
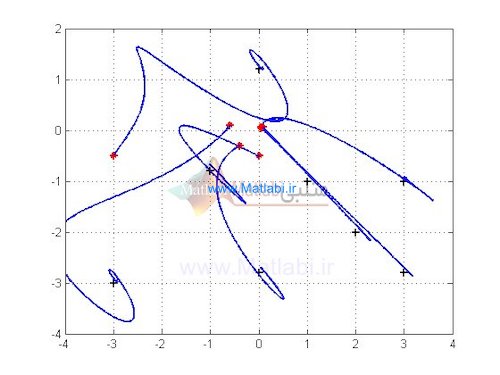
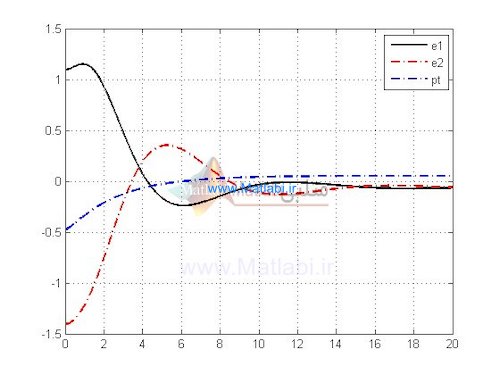
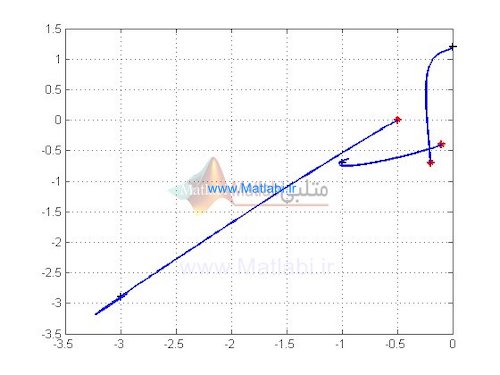
نتایج بدست آمده از شبیه سازی با متلب:
کلید واژه :
Formation control, Second-order systems, Optimal control, Collision avoidance
شبیه سازی مقاله
Formation control and collision avoidance for multi-agent systems based on position estimation
توسط کارشناسان سایت متلبی پیاده سازی گردیده و به تعداد محدودی قابل فروش می باشد.
سفارش انجام پروژه مشابه
درصورتیکه این محصول دقیقا مطابق خواسته شما نمی باشد،. با کلیک بر روی کلید زیر پروژه دلخواه خود را سفارش دهید.






دیدگاهها
هیچ دیدگاهی برای این محصول نوشته نشده است.