توضیحات
Formation-Based Cooperative Transportation by a Group of Non-holonomic Mobile Robots
آرایش مبنی بر همکاری بوسیله موبایل ربات غیر هولونومیک
مقدمه:
در این گزارش به بررسی حرکت گروهی با آرایش منظم دسته ای از ربات های غیر هولومنیک می پردازیم. در این روش برای هماهنگ سازی حرکت هماهنگ ربات ها از مدل پیشرو-پسرو استفاده شده است. در این مدل یک رهبر ورجود دارد که به صورت مجازی تعریف می شود و موقعیت سایر ربات ها نسبت به این رهبر مجازی مشخص می شود و طی یک الگوریتم کنترلی ربات ها به مکان ها مورد نظر با سرعت مناسب هدایت می شوند. این ربات ها دارای محدودیت ها کنترلی می باشند که بایستی الگوریتم کنترلی این موارد را رعایت کند.
در ادامه به بررسی معادلات هر کدام از ربات ها می پردازیم و همچنین روابط لازم برای ایجاد آرایش مطلوب در حرکت گروهی را مشخص می کنیم. مسیر رهبر مجازی را نیز به صورتی پیاده سازی می کنیم که ربات ها قابلیت تعقیب مسیر را داشته باشند. در ادامه با استفاده از کدنویسی در متلب به شبیه سازی آن در حالت ها دو ربات و سه ربات می پردازیم.
بررسی معادلات حاکم بر ربات
ربات مد نظر به صورت زیر می باشد
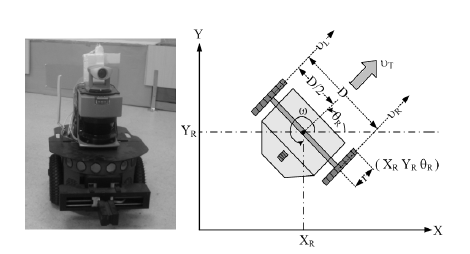
سرعت زاویه ای و سرعت انتقالی ربات بر حسب سرعت چرخش چرخ های چپ و راست به صورت زیر می باشد.

که این رابطه را می توان به صورت زیر بازنویسی کرد.
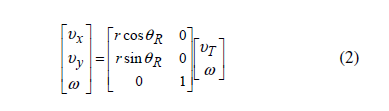
که البته این ربات دارای محدودیت هایی از جنس مقدار ماکزیمم سرعت چرخشی و سرعت انتقالی می باشد.
بررسی روابط آرایش ربات ها
برای بررسی روابط آرایش مجموعه ای ربات ها ابتدا می توان این آرایش را در مورد دو ربات به صورت پارامتری نوشت و آن را به چند ربات تعمیم داد.

اگر در مسیر مورد نظر برای رهبر مجازی معادلات مسیر زیر را داشته باشیم.

برای سایر ربات ها پیرو خواهیم داشت:

که مکان مطلوب هر یک از ربات های پیرو را مشخص می کند و داریم:

که سرعت و زاویه مطلوب حرکت را مشخص می کند.
بررسی الگوریتم کنترلی
سیستم حلقه کنترلی به صورت زیر می باشد.

در این سیستم کنترلی ابتدا نیاز داریم تا با محاسبه مکان و زاویه ربات پیرو و مقایسه آن با مکان مطلوب که از طریق معادلات فوق مشخص می شود سیگنال خطا را بر حسب فرمول زیر تشکیل دهیم.

در ادامه با توجه به سیگنال خطا باید ورودی کنترلی را به صورت مناسبی تولید کنیم که روابط آن به صورت زیر می باشد.

در ادامه بر روی سیگنال کنترلی محدودیت های عملیاتی اعمال می شود و این ورودی به سیستم اعمال می شود.
بررسی مسیر و آرایش ربات ها
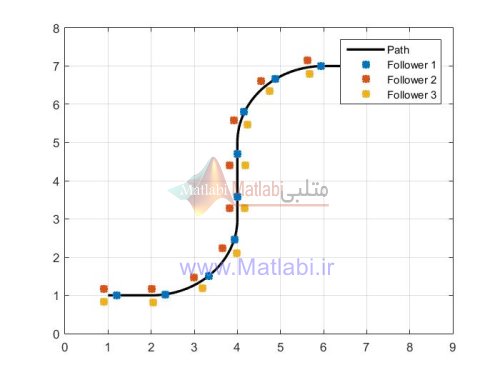
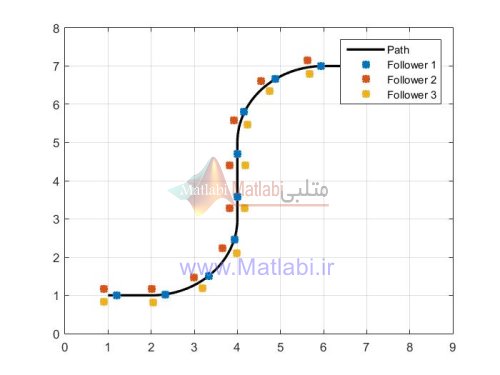
یک مسیر هموار برای ربات رهبر مجازی به صورت زیر می باشد.

و آرایش به صورت زیر ربات های مورد نظر می باشد.
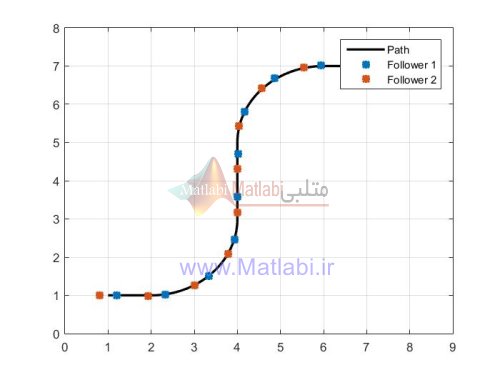
الف) به صورت دو ربات: که این آرایش به صورت خطی می باشد و باید یک ربات دقیقا پشت سر ربات دیگر با فاصله ثابت حرکت کند. که نتیجه شبیه سازی آن در متلب در ده فرم به صورت زیر می باشد.
گزارش شبیه سازی
%% Simulation of Formation-Based Cooperative Transportation by a Group of Non-holonomic Mobile Robots
% Three Robots Cooperative Formation
clear all
close all
clc
در قسمت زیر مقادیر زمان نمونه برداری و سرعت حرکت ربات تعریف شده است.
Ts = 0.1; %% Sampling Time
Vr_max = 0.05; %% 50 mm/sec Velocity
در قسمت زیر مسیر به پنج قسمت تقسیم شده است و برای هر قسمت با توجه به سرعت ربات مسیر بر حسب x و y تولید شده است. و در ادامه این مسیر در کنار هم به تشکیل کل مسیر منجر شده است.
X1r = 1:Vr_max*Ts:2; % Part 1 of path
Y1r = ones(size(X1r));
X2r = 2 + 2*cos(-pi/2:Ts*Vr_max*0.5:0); % Part 2 of path
Y2r = 3 + 2*sin(-pi/2:Ts*Vr_max*0.5:0);
X2r = X2r(2:end);
Y2r = Y2r(2:end);
Y3r = 3:Vr_max*Ts:5; % Part 3 of path
X3r = 4*ones(size(Y3r));
X4r = 6 + 2*cos(pi:-Ts*Vr_max*0.5:pi/2); % Part 4 of path
Y4r = 5 + 2*sin(pi:-Ts*Vr_max*0.5:pi/2);
X5r = 6:Vr_max*Ts:8; % Part 5 of path
Y5r = 7*ones(size(X5r));
Xr = [X1r X2r X3r X4r X5r]; % Create all of the path
Yr = [Y1r Y2r Y3r Y4r Y5r];
در اینجا فقط نمونه ای از گزارش شبیه سازی آمده است.
برای تهیه شبیه سازی و گزارش آن باید این محصول خریداری شود.
برای اینکه نویز اندازه گیری وارد شود و طبق داده های شبیه سازی ها نمودارها نویزی بشوند، نتایج نسبتا به مقادیر داخل مقاله نزدیک شده است ولی به خاطر وابستگی شدید مقادیر خروجی به ضرایب کنترلی Kx, Ky, Ktheta و از طرفی به Ts و … تفاوت هایی وجود داره که اجتناب ناپذیر هست.
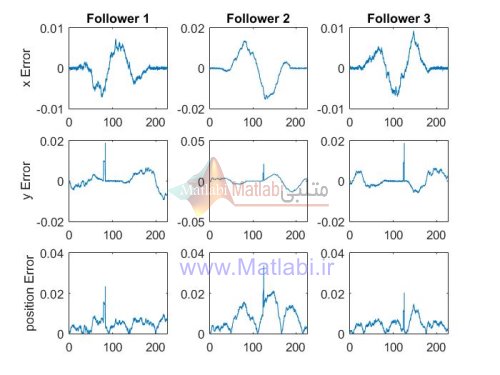
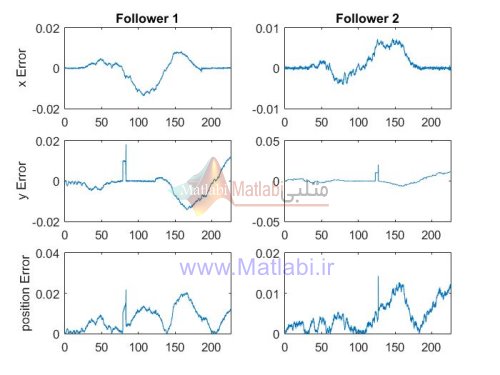
در نمودارهای خروجی مقادیر خطای ردیابی در جهت x و y و همچنین خطای ردیابی فاصله در یک نمودار، و وضعیت ربات ها در 10 فرم رسم شده اند.
نتایج بدست آمده از شبیه سازی با متلب
دو ربات و سه ربات:
کلید واژه:
cooperative transportation, motion planning, tracking control, formation, multiple robots
شبیه سازی مقاله
Formation-Based Cooperative Transportation by a Group of Non-holonomic Mobile Robots
توسط کارشناسان سایت متلبی پیاده سازی گردیده و به تعداد محدودی قابل فروش می باشد.
سفارش انجام پروژه مشابه
درصورتیکه این محصول دقیقا مطابق خواسته شما نمی باشد،. با کلیک بر روی کلید زیر پروژه دلخواه خود را سفارش دهید.






دیدگاهها
هیچ دیدگاهی برای این محصول نوشته نشده است.