توضیحات
Feedback Linearization vs. Adaptive Sliding Mode Control for a Quadrotor Helicopter
ابتدا با استفاده از روابط 14 تا 19 معادلات سیستم را می نویسیم.
برای پیاده سازی کنترل کننده پیشنهادی از رابطه 24 استفاده میکنیم.
پارامترهای نامعلوم این رابطه در معادلات 20 تا 23 داده شده است.
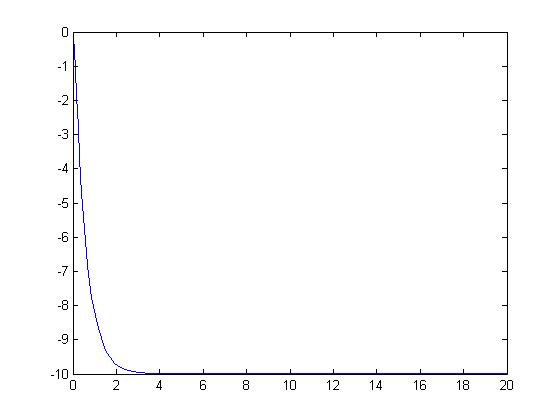
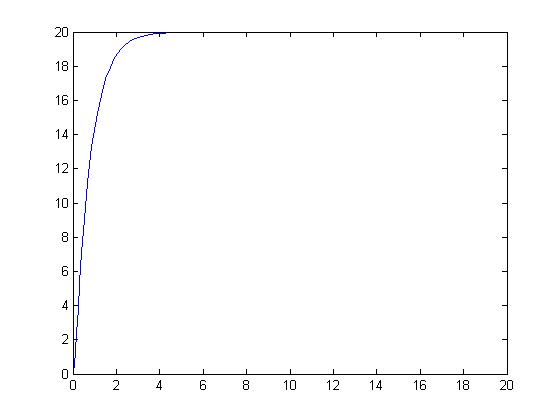
فرض می کنیم هدف سیستم حرکت از مبدأ به سمت نقطه (10,-10,20) است.
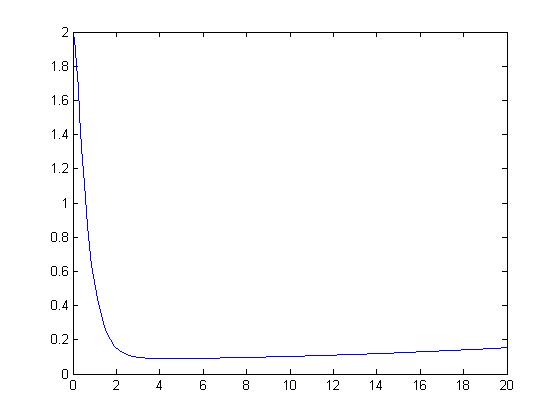
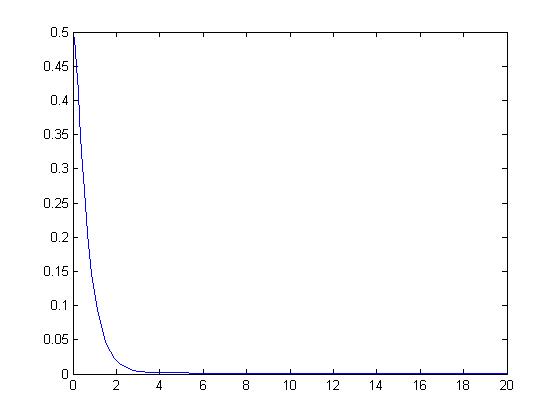
همچنین متغیرهای مربوط به جهتگیری در ابتدا در نقطه (1,2,0.5) قرار دارند که بایستی به نقطه صفر برسند.
نتایج شبیه سازی را در نمودارهای بعد ملاحظه می کنید. سه نمودار اول مربوط به متغیرهای موقعیت و سه نمودار بعد مربوط به متغیرهای جهت گیری هستند. همانطور که دیده می شود رسیدن به نقطه مورد نظر به خوبی انجام شده است. 

کلید واژه : کنترل غیرخطی- خطی سازی فیدبک ، رباتیک Feedback linearization, sliding mode control, UAV, quadrotor helicopter
شبیه سازی Feedback Linearization vs. Adaptive Sliding Mode Control for a Quadrotor Helicopter که سیستم خطی سازی فیدبک حالت آن انجام شده است توسط کارشناسان سایت متلبی پیاده سازی گردیده و به تعداد محدودی قابل فروش می باشد.
سفارش انجام پروژه مشابه
درصورتیکه این محصول دقیقا مطابق خواسته شما نمی باشد،. با کلیک بر روی کلید زیر پروژه دلخواه خود را سفارش دهید.






دیدگاهها
هیچ دیدگاهی برای این محصول نوشته نشده است.