












توضیحات
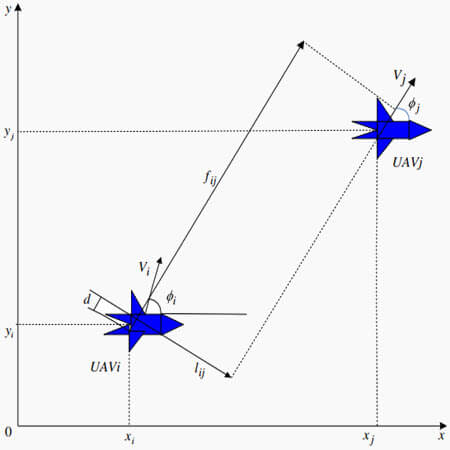
کنترل مشارکتی مقاوم به خطا پهپادهای در معرض خطاهای دائمی و متناوب
عنوان اصلی مقاله
Fault Tolerant Formations Control of UAVs Subject to Permanent and Intermittent Faults
شبیه سازی در محیط ام فایل متلب انجام شده است.
دارای گزارش ورد 2 صفحه ای می باشد.
دارای ویدیو توضیحات 7 دقیقه ای می باشد.
توضیحات پروژه کنترل مشارکتی مقاوم به خطا
در شبیه سازی مقاله 5 ام فایل اصلی وجود دارد که در ابتدای m فایلها مشخص شده مربوط به کدام نتایج مقاله است.
پوشه های sedumi-master و YALMIP-master برای حل مساله LMI است که کنار ام فایلهای اصلی وجود دارند و بایستی نصب شوند.(نحوه نصب در گزارش ورد آمده است.)
اين مقاله داراي ابهامات و اشكالاتي است كه در زیر به آن اشاره میکنیم:
اشکال 1: در LMI معادله 23 اشکالات زیادی وجود دارد و در نتیجه نمی توان آن را وارد شبیه سازی نمود. در ماتریس ارائه شده، درایه (1,1) دارای ابعاد 10 در 10 است در حالی که درایه (2,1) دارای ابعاد 10 در 2 (ماتریس G 10 در 2 می باشد). در حالی که می دانیم در یک ماتریس که ترکیب ماتریس های گوناگون است، درایه های زیر هم باید دارای ستون های یکسان باشند. مشکل اساسی دیگر، درایه (3,1) است. ماتریس C دارای ابعاد 2 در 8 و ماتریس X دارای ابعاد 10 در 10 می باشند. ملاحظه می گردد که این ضرب اصلا قابل انجام نیست.
برای رفع این مشکل، بنده از LMI معادله 14 با ماتریس های به کار رفته در LMI معادله 23 استفاده کردم. زیرا LMI معادله 14 کاملا درست است و با استفاده از X و Y به جای Z و W و همچنین ماتریس های A و B به جای .. و ..، مشکل حل می گردد.
اشکال 2: برای حالت هایی که خطا وارد سیستم شده است، با وجود این که خطا از زمانی غیر از ثانیه صفر وارد گردیده (مثلا از ثانیه 5)، ولی اثر آن در نمودارها از ثانیه صفر می باشد!!! این موضوع عجیب و غیرمنطقی است.
با تمام این وجود شبیه سازی با موفقیت انجام شده و نتایج مطلوب به دست آمده است.
نتایج شبیه سازی با متلب:
شبیه سازی شامل 5 فایل با نام های run1 تا run5 است. هر کدام از این فایل ها یکی از حالت ها را اجرا می نمایند (مثلا run1 حالت بدون خطا و سایر فایل ها هم حالت های خطا دار). برای این که ببینید هر فایل چه نمودارهایی را تولید می کند به خط 2 هر کدام از آن ها رجوع نمایید.
نتایج بدست آمده از شبیه سازی, شامل شکل 4 تا 19 مقاله است.
برای نمونه تعدادی از نتایج در زیر نمایش داده میشود. و مابقی در گالری محصول قابل نمایش است.
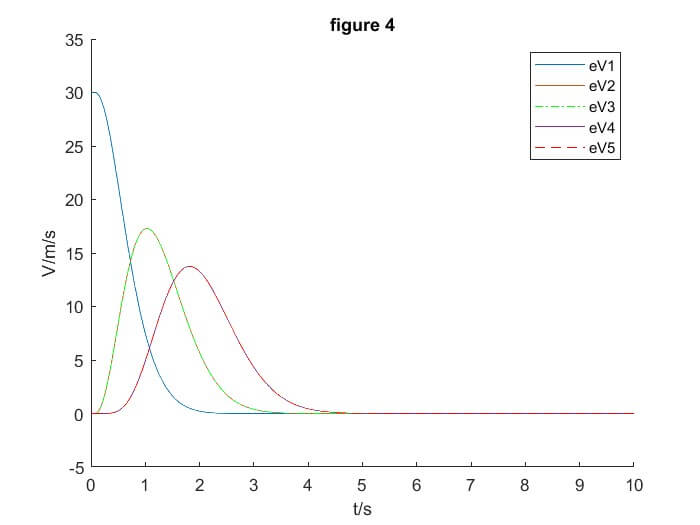
شکل 4 خطای سرعت سیستم معمولی
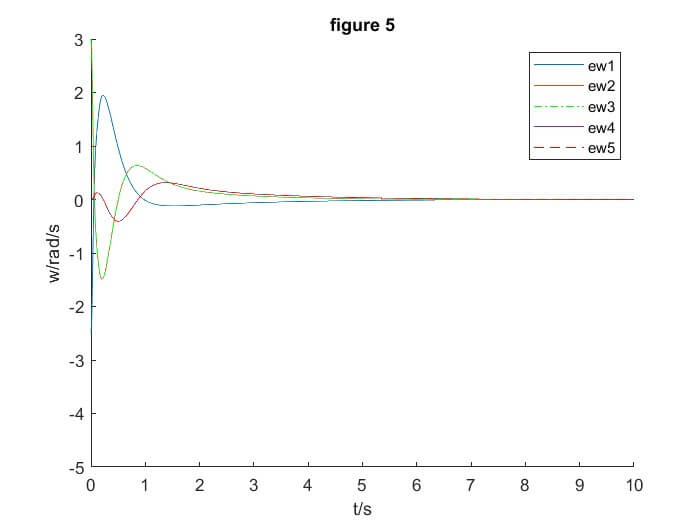
شکل 5 خطای سرعت زاویه ای سیستم نرمال
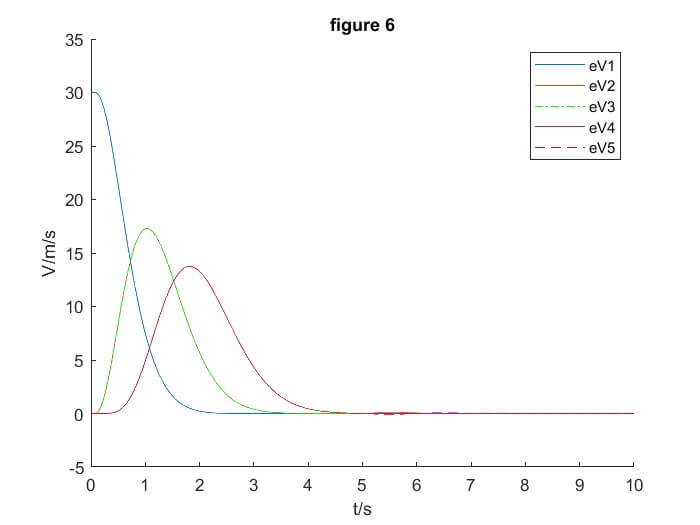
شکل 6 خطای سرعت تحت خطای اولیه
UAVs: unmanned aerial vehicles ترجمه: وسایل نقلیه هوایی بدون سرنشین (پهپاد)
این مقاله به بررسی مشکل FTC* پهپادها می پردازد. مشارکت در حضور فالت های دائمی و متناوب.
*fault tolerant control (FTC)
شاید به موارد زیر نیز علاقه مند باشید:
- طراحی مشاهده گر حالت لغزشی تطبیقی دکوپله برای توربین های بادی در معرض خطاهای همزمان در حسگرها و محرک ها
- جبران دینامیک توان راکتیو برای خطاهای مختلف در سیستم قدرت (statcom)
- یک روش طراحی کنترل کننده خطی MIMO برای بهینه سازی مقاوم و درجه دوم
- افزایش دقت ردیابی مسیر برای ربات صنعتی با کنترل تطبیقی مقاوم
کلیدواژه:
مشارکت پهپاد, خطای دائمی, خطای متناوب, کنترل متحمل خطا
UAVs formation, Permanent fault, Intermittent fault, Fault tolerant control
کنترل مشارکتی مقاوم به خطا پهپادهای در معرض خطاهای دائمی و متناوب با متلب
طبق توضیحات فوق توسط کارشناسان سایت متلبی تهیه شده است و به تعداد محدودی قابل فروش می باشد.
سفارش انجام پروژه مشابه
درصورتیکه این محصول دقیقا مطابق خواسته شما نمی باشد،.
با کلیک بر روی کلید زیر پروژه دلخواه خود را سفارش دهید.






دیدگاهها
هیچ دیدگاهی برای این محصول نوشته نشده است.