توضیحات
Fault-tolerant control of wind turbine swith hydrostatic transmission using Takagi–Sugeno and sliding mode techniques
کنترل مقاومت به خطا در توربینهای بادی با روش انتقال هیدرواستاتیک و با استفاده از تکنیکهای تاکاگی-ساگنو و مد لغزشی
شبیه سازی مد لغزشی و مدل تاکاگی ساگنو که به وسیله این دو روش ما می توانیم خطا را ردیابی کنیم .
در این محصول مد لغزشی و مدل تاکاگی ساگنو شبیه سازی شده است.
این محصول دارای ترجمه فارسی مقاله در قالب ورد است.
دارای فیلم از نحوه اجرای برنامه متلب است.
قسمتی از ترجمه مقاله
چکیده
در این مقاله، یک رویتگر مد لغزشی تاکاگی-ساگنو برای تشخیص خطای عملگر مکانیکی (Actuator) و طرح کنترل مقاومت به خطای توربینهای بادی با روش انتقال هیدرواستاتیک ارائه شده است.
همچنین نشان داده خواهد شد که تکنیکهای مد لغزشی مزایایی دارند که میتوان به وسیله آنها، چندین خطای عملگر مکانیکی محور متصلکننده (Drive Train) توربین بادی را به طور همزمان با یک رویتگر یکسان بازسازی کرد و آن را به طور مستقیم برای جبرانسازی خطا به کار گرفت.
علاوه بر آن، یک رویکرد جبرانسازی ساده به وسیله کم کردن خطاهای بازسازی شده به دست آمده از ورودیهای (همراه با خطا) پیادهسازی شده است.
این ورودیهای اصلاح شده به صورت عملگرها مکانیکی مجازی روی سیستم عمل میکنند، به گونهای که کنترلکننده طراحی شده اصلی برای حالت نامی، یعنی وضعیت بدون خطا، هنوز قابل استفاده است.
بازسازی خطا و استراتژی کنترل مقاومت به خطا در شبیهسازیهایی با چندین خطا از انواع مختلف مورد آزمایش قرار گرفتهاند.
گزارش شبیه سازی با متلب
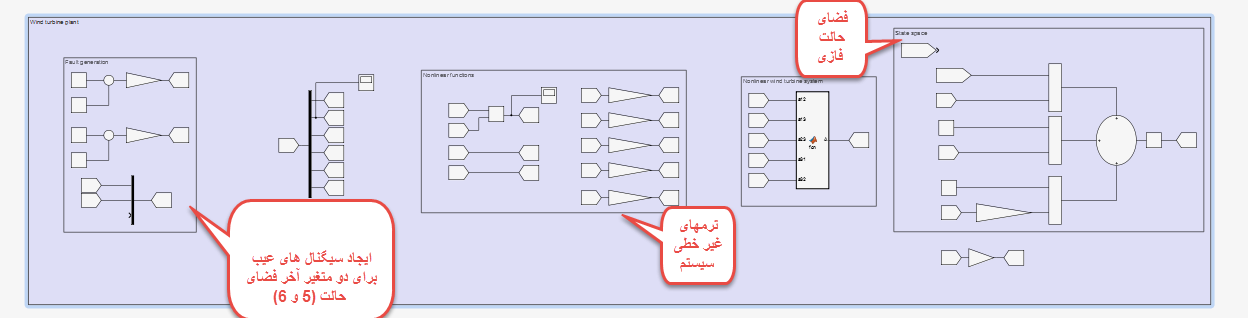
سیستم مورد نظر، یک فضای حالت با 6 متغیر حالت، 5 خروجی، 3 ورودی کنترلی به سه حالت آخر و 2 عیب به دو حالت آخر میباشد.
مدل سازی سیستم به صورت فازی تاگاکی سوگنو است.
به این معنی که سیستم غیر خطی توربین باد با انتقال قدرت هیدرولیکی به صورت فازی مدل میشود تا در رویتگر مدلغزشی از آن استفاده گردد.
در این مقاله، هیچ ضریب یا پارامتری از سیستم داده نشده (متاسفانه) و برنامه نویس با شناختی که از بنچمارکهای توربین بادی داشته از طریق 5 مرجعی که به همراه محصول هست، ضرایب را بدست آورده است.
ولی طبیعتا ممکن است با برخی پارامترهایی که نویسنده مقاله استفاده کرده متفاوت باشند.
در روند شبیه سازی تلاش شده تا همه ی ضرایب و پارامترها و سیگنالها همنام با مقاله باشند. تولید سیستم غیرخطی در سیمولینک بر طبق روابط 6-7-8 صورت گرفته است.
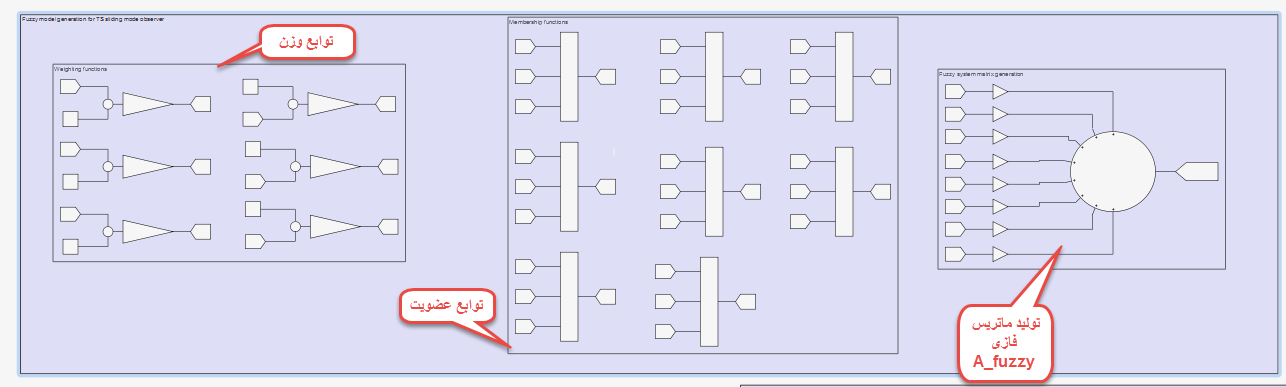
مدلسازی فازی شامل ایجاد توابع وزن (رابطه 11)، توابع عضویت (رابطه 13) و فضای حالت فازی است (رابطه 14).
از آنجا که ترمهای غیرخطی در این مقاله تنها به ماتریس A وارد میشوند، در نتیجه توابع وزن و عضویت را برای ایجاد A_fuzzy استفاده میکنیم.
یک بلاک به نام Fuzzy model generation ایجاد شده است.
f1, f2 ,f3 : ترمهای غیر خطی
wij: توابع وزن
hi: توابع عضویت
f1_U:
f1_D:
سیستم فضای حالت غیرخطی توربین باد که به دو حالت آخر آن عیب وارد میشود، در سیمولینک در یک بلاک به نام Wind turbine plant قرار گرفته است.
رویتگر مدلغزشی، با استفاده از روابط 24-25-33-34-35 طراحی شده است.
در فایل سیمولینک، یک بلاک به نام TS sliding mode observer ایجاد شده است.
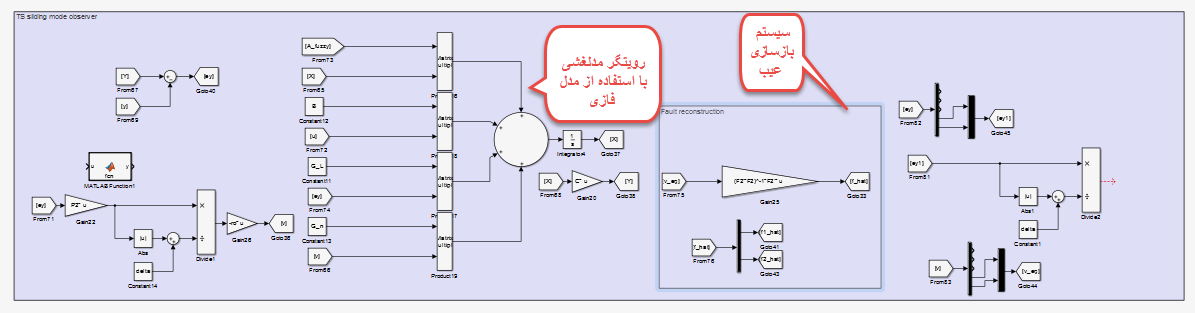
یک کنترل کننده نیز ساخته شده که از روابط 18-19-20 منتج میگردد.
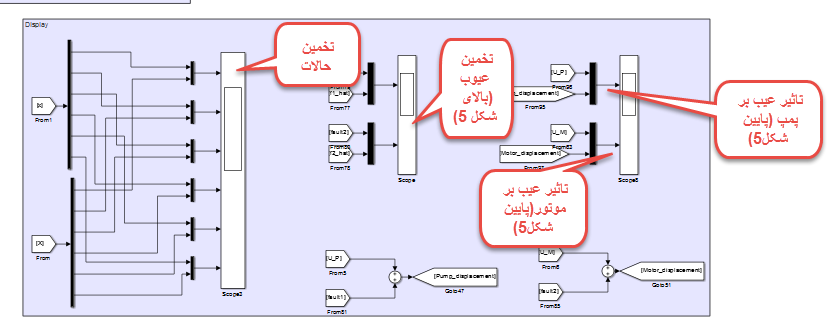
تصویر بلاک مربوط کنترل کننده در زیر نشان داده شده است.

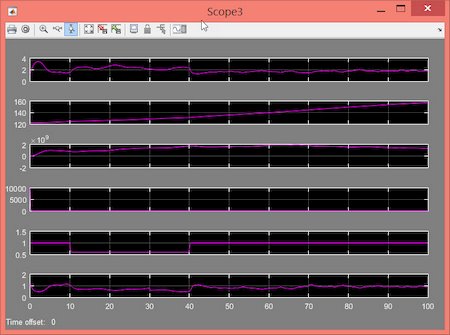
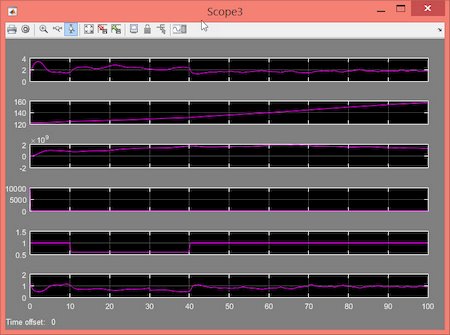
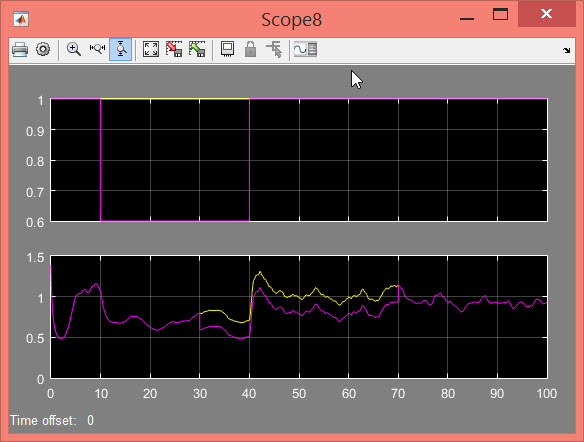
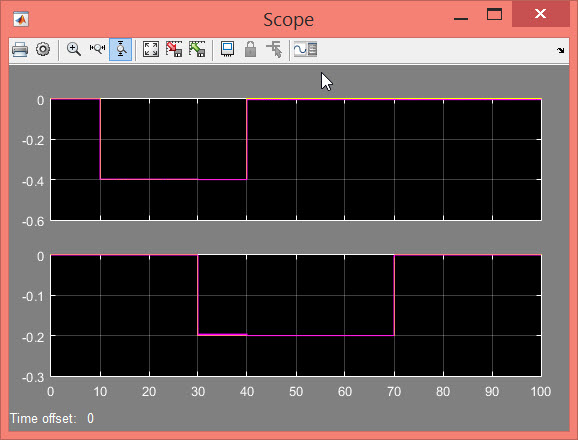
در نهایت نتیجه ی سیستم تشخیص عیب، تخمین شش حالت سیستم و تخمین دو عیب مطابق شکل های 5 و 6 است.
در بلاک Display این امر امکان پذیر است.
توجه کنید که مقاله دو شبیه سازی برای سناریو های مختلف (شکل های 5 و 6) انجام داده که با رجوع به کد، میتوان آنها را از تغییر داد.
fault1: سیگنال عیب 1
fault2: سیگنال عیب 2
f1_hat: تخمین سیگنال عیب 1
f2_hat: تخمین سیگنال عیب 2
x: حالات سیستم
X: حالات observer. (تخمین حالات سیستم)
نتایج بدست آمده از شبیه سازی با متلب
کلید واژه:
Wind turbine control, Fault tolerant Control, Sliding-mode observer, Takagi–Sugeno systems
شبیه سازی مقاله
Fault-tolerant control of wind turbine swith hydrostatic transmission using Takagi–Sugeno and sliding mode techniques
توسط کارشناسان سایت متلبی پیاده سازی گردیده و به تعداد محدودی قابل فروش می باشد.
سفارش انجام پروژه مشابه
درصورتیکه این محصول دقیقا مطابق خواسته شما نمی باشد،. با کلیک بر روی کلید زیر پروژه دلخواه خود را سفارش دهید.






علی علیمردانی –
ممنون از سایت خوبتون