توضیحات
Fast Motion Planning for Agile Space Systems with Multiple Obstacles
برنامه ریزی حرکت سریع برای سیستم های فضایی چابک با موانع متعدد
شبیه سازی در محیط ام فایل متلب انجام شده است.
پیاده سازی برای هر دو حالت دوبعدی و سه بعدی انجام شده است.
دارای گزارش مختصر از نحوه اجرای برنامه متلب است.
دارای ویدیو از نحوه اجرای برنامه متلب است.
در این شبیه سازی از تولباکس کانوکس CVX استفاده شده است.
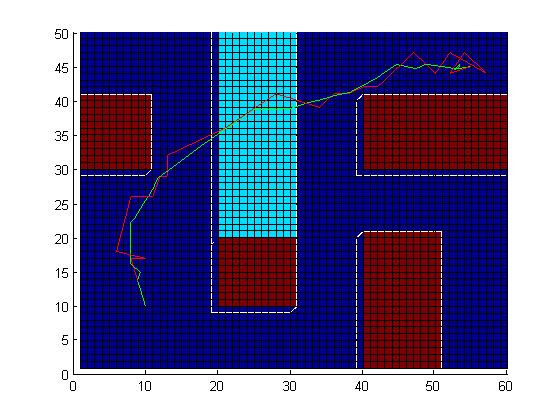
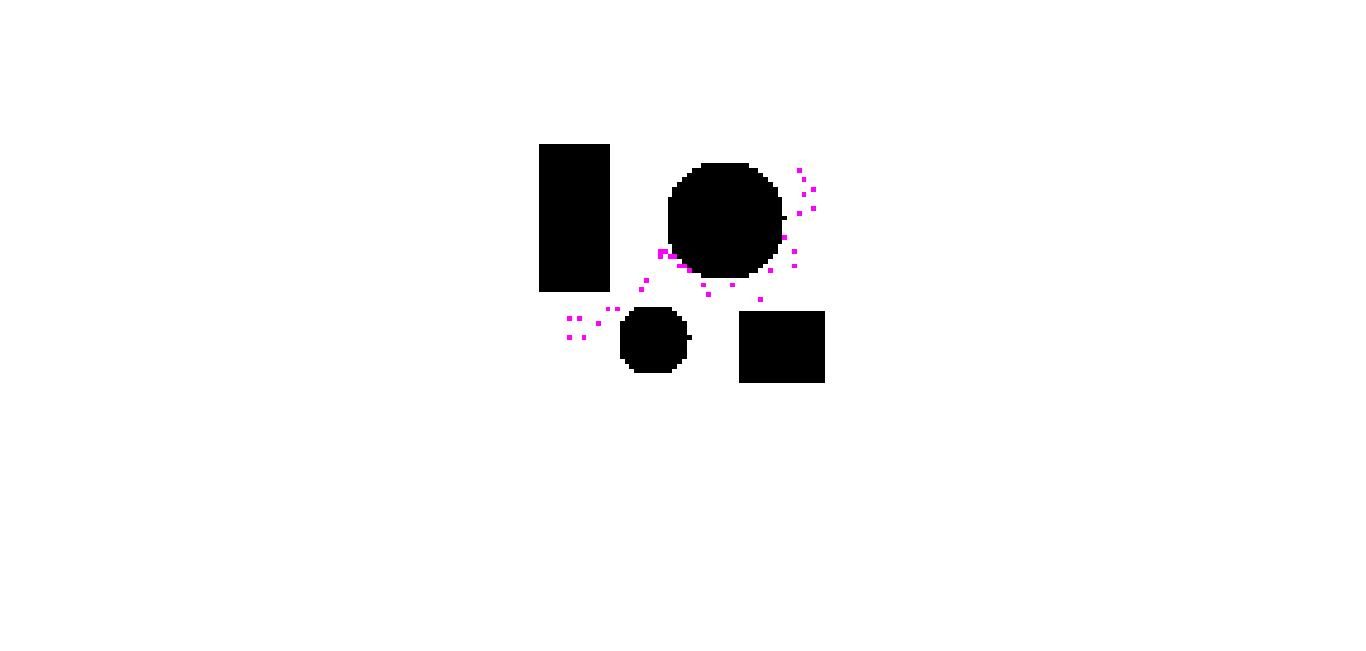
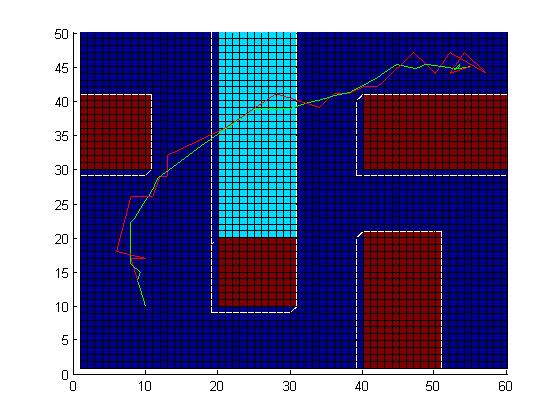
نتایج بدست آمده از شبیه سازی با متلب
برای حالت دو بعدی:
برای حالت 3بعدی
کلیدواژه:
Sequential Convex Programming, spacecraft trajectory planning ,
شبیه سازی
Fast Motion Planning for Agile Space Systems with Multiple Obstacles
توسط کارشناسان سایت متلبی تهیه شده است و به تعداد محدودی قابل فروش می باشد.
سفارش انجام پروژه مشابه
درصورتیکه این محصول دقیقا مطابق خواسته شما نمی باشد،.
با کلیک بر روی کلید زیر پروژه دلخواه خود را سفارش دهید.






دیدگاهها
هیچ دیدگاهی برای این محصول نوشته نشده است.