
توضیحات
طراحی اتوپایلوت گام مقاوم مبتنی بر مشاهده گر حالت پیشرفته برای موشک های تاکتیکی
عنوان اصلی مقاله:
Extended state observer-based robust pitch autopilot design for tactical missiles
شبیه سازی در محیط سیمولینک متلب انجام شده است. (متلب2020)
دارای گزارش ویدیویی 17دقیقه ای می باشد.
شبیه سازی با متلب 2023 نیز تست و اجرا شده است.
توضیحات پروژه مشاهده گر حالت پیشرفته
در این مقاله به روش extended state observer (ESO) (مشاهده گر حالت پیشرفته) پرداخته شده است. همچنین دو روش Predictive controller (PC) (کنترل پیش بین) و Sliding-mode control (SMC) (اسلایدینگ مود کنترل) نیز برای مقایسه شبیه سازی شده است.
دقت کنید روش اصلی مقاله به همراه دو روش مقایسه ای که مربوط به رفرنس های 48و49 مقاله مربوطه است پیاده سازی شده است.
فایل های شبیه سازی شامل یک ام فایل جهت فراخوانی داده های اولیه و اجرای شبیه سازی بطور کامل است. یعنی با اجرای این فایل دیگر نیاز به اجرای فایلهای سیمولینک نیست. سه فایل سیمولینک نیز برای روش اصلی ESO و روش های مقایسه ای PC , SMC وجود دارد. در فایل های سیمولینک بخش های زیادی از آن به صورت متلب فانکشن و بصورت کدنویسی انجام شده و دلیل اینکه از سیمولینک استفاده شده, بهره برداری از بلوک هایی در سیمولینک متلب است و قابلیتهایی در سیمولینک متلب هست که شبیه سازی این مقاله را ممکن میکند.
شبیه سازی ESO دو حالت دارد. یکی عدد ثابت ماخ (Mach) است و یکی ماخ متغیر است. اغتشاش نیز یکی صفر و یکی در حالت سینوسی است که در ویدیوی گزارش به جزییات آن پرداخته شده است. در سیمولینک با بلوک ها و بخش های کاملا مشخص, مثلا عدم قطعیت یا مدل غیرخطی موشک و… شبیه سازی شده و در گزارش ویدیویی نیز به هر کدام از آنها با توجه به مقاله پرداخته شده است.
نتایج شبیه سازی با متلب
با اجرای شبیه سازی به نتایج شکل 2 تا 9 مقاله میرسیم. که در زیر هر کدام از آنها آورده شده است:
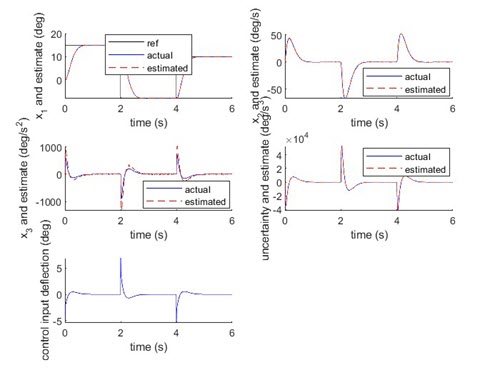
Fig2: Performance of ESO in state estimation
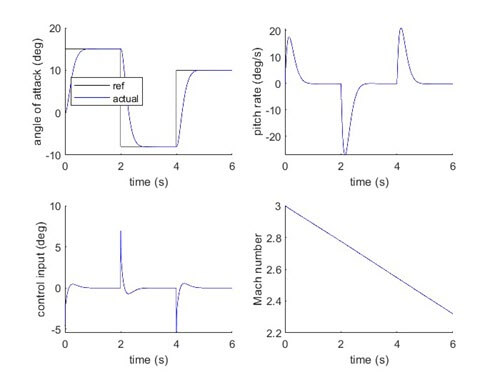
Fig3: Performance of ESO-based controller with Mach dynamics

Fig4: Performance of ESO-based controller without uncertainty
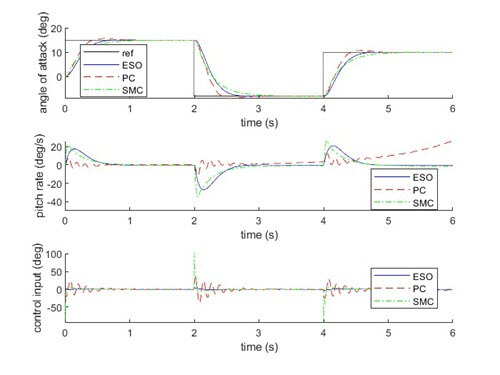
Fig5: Performance of ESO-based controller with +30 per cent uncertainty in Cn and Cm
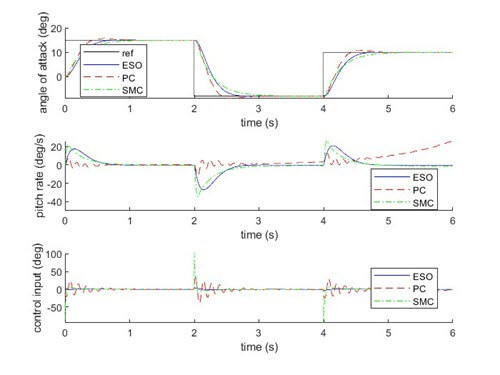
Fig6: Performance of ESO-based controller with +30 per cent uncertainty in Cm and -30 per cent uncertainty in Cn
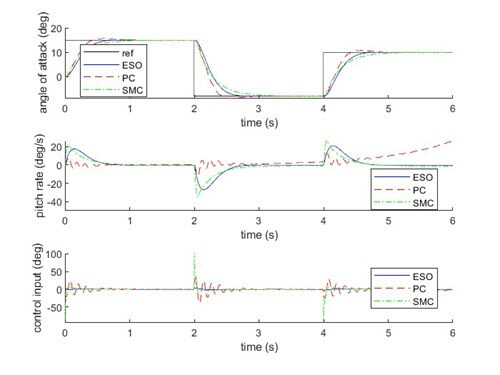
Fig7: Performance of ESO-based controller with -30 per cent uncertainty in Cm and +30 per cent uncertainty in Cn
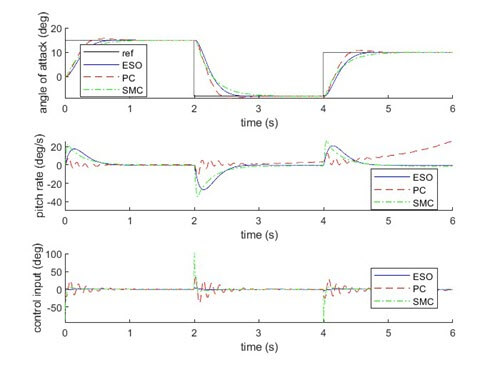
Fig8: Performance of ESO-based controller with -30 per cent uncertainty in Cm and -30 per cent uncertainty in Cn

Fig9: Performance of ESO-based controller with +20 per cent uncertainty in Cm and -20 per cent uncertainty in Cn, wind gust and time delay
شاید به موارد زیر نیز علاقه مند باشید:
- اعتبار سنجی پیشرفته اندیس خوشه برای ارزیابی تعداد بهینه کلاسترها برای الگوریتم فازی C_Means
- بهبود عملکرد اتوپایلوت موشکی موجود با استفاده از کنترل ساده تطبیقی
- طراحی سیستم کنترل موشک با استفاده از کنترل کننده PD همراه با فیلتر پایین گذر مرتبه دوم با تقریب باترورث
- طراحی اتوپایلوت موشک BTT با کنترل پیش بین تعمیم یافته(GPC)
- تشخیص و جداسازی عیب حسگر برای یک کلاس از سیستم غیرخطی نامشخص با استفاده از رویتگر مود لغزشی
کلیدواژه:
pitch autopilot, input–output linearization, extended state observer, robust control
اتوپایلوت, خطی سازی ورودی-خروجی, ناظر حالت توسعه یافته, کنترل مقاوم
طراحی اتوپایلوت گام مقاوم مبتنی بر مشاهده گر حالت پیشرفته برای موشک های تاکتیکی با متلب
طبق توضیحات فوق توسط کارشناسان سایت متلبی تهیه شده است و به تعداد محدودی قابل فروش می باشد.
سفارش انجام پروژه مشابه
درصورتیکه این محصول دقیقا مطابق خواسته شما نمی باشد،.
با کلیک بر روی کلید زیر پروژه دلخواه خود را سفارش دهید.




دیدگاهها
هیچ دیدگاهی برای این محصول نوشته نشده است.