توضیحات
کنترل ردیابی خروجی Hبینهایت با رویداد و خود راهانداز برای سیستمهای متغیر خطی زمان گسسته با تاخیرهای ناشی از شبکه
عنوان اصلی مقاله:
Event-triggered and self-triggered H∞ output tracking control for discrete-time linear parameter-varying systems with network-induced delays
شبیه سازی در محیط ام فایل متلب انجام شده است.
دارای گزارش 11 صفحه در قالب ورد است شامل توضیح کدها و نمایش نتایج خروجی از شبیه سازی
دارای فایل ورد سوال و پاسخ می باشد.
ترجمه چکیده مقاله:
در این مقاله، مشکل ردیابی خروجی ∞H ناشی از رویداد و خود راهاندازی سیستمهای LPV گسسته با تاخیر ناشی از شبکه را بررسی میکنیم. با در نظر گرفتن تأخیر زمانی و اختلال خارجی، مشکل ردیابی خروجی راهاندازی رویداد حلقه بسته را در یک سیستم متغیر پارامتر خطی گسسته چند موضوعی با تأخیر زمانی با مکانیسم نسبی ایجاد رویداد فرموله میکنیم. سپس، با ساخت تابع لیاپانوف-کراسوفسکی وابسته به پارامتر، شرایط کافی را به دست میآوریم به طوری که سیستم حلقه بسته مجانبی پایدار است و عملکرد ردیابی خروجی ∞H را برآورده میکند. علاوه بر این، ما رویکردی را برای طراحی مکانیسم راهاندازی رویداد و کنترلکننده ردیابی خروجی ∞H توسعه میدهیم. پارامترهای مکانیسم راهاندازی رویداد و دستاوردهای کنترلکننده خروجی با حل نابرابریهای ماتریس خطی بهدست میآیند. علاوه بر این، ما نتایج کنترل رویداد راهاندازی را به کنترل ردیابی خروجی ∞H خود راهانداز گسترش میدهیم. این نه تنها استفاده از پهنای باند شبکه را کاهش می دهد اما از استفاده از سخت افزار اضافی نیز جلوگیری می کند. در نهایت، شبیه سازی عددی برای نشان دادن سودمندی و اثربخشی روش پیشنهادی گنجانده شده است.
توضیحات پروژه آموزشی کنترل ردیابی خروجی ∞H
شبیه سازی در 5پوشه به تفکیک تهیه شده است که در زیر به صورت کلی به آن ها می پردازیم. در گزارش این پروژه آموزشی, توضیح مربوط به یکی پوشه ها داده شده و مابقی پوشه ها مشابهت زیادی به هم دارند. در پایان نیز نتایج شبیه سازی آورده شده است, که جهت مشاهده شما در پایان همین صفحه آورده ایم.
در زیر توضیحات کلی هر ام فایل آورده شده است:
فایل zero_order_hold
این کد دو ورودی زمان و پارامتر متغیر با زمان را می گیرد و ZOH آن ها را در خروجی می دهد. خطوط این کدها بحث علمی ندارند و صرفا برنامه نویسی است.
فایل solve_lmi
این کد به حل LMI می پردازد.
فایل main که بدنه اصلی کدنویسی است و برنامه با آن قابل اجراست.
در زیر بخشی از توضیحات داخل فایل ورد را جهت آشنایی با نحوه تشریح شبیه سازی آورده ایم:
خطوط 7 تا 18: ماتریس ها و ثابت های مساله 1-5
خطوط 21 تا 25: ماتریس های سیستم تعمیم سافته
خطوط 28 و 29: محاسبه ضرایب و ماتریس های خروجی از LMI
خطوط 32 تا 48: مقدار دهی اولیه به پارامترهای مربوط به مساله کنترل 1-5
خط 50: آغاز حلقه محاسبات اصلی
در این ام فایل شرط ETM نیز وجود دارد و معادلات سیستم و نتایج توسط همین ام فایل بدست خواهد آمد.
توضیحات فوق در مورد پوشه ای با نام 5-1-1 می باشد. در زیر تفاوت پوشه های دیگر را ذکر می کنیم:
کدهای موجود در پوشه 5-1-2 و 5-1-3
این کدها به تولید شکل های 7 تا 10 می پردازند. تفاوت این کدها با کدهای پوشه قبلی در این است که در فایل main ورودی سیستم مرجع و نیز اغتشاش w دیگر صفر نیستند.
کدهای موجود در پوشه 5-1-4
تفاوت این کدها تنها در شرط trig است.
کدهای موجود در پوشه 5-2
این کدها مربوط به مساله 2-5 مقاله است. هیچ تفاوتی با کدهای قبلی ندارند و فقط ورودی ها و ماتریس هایشان متفاوت است.
نتایج بدست آمده از شبیه سازی با متلب

The state response curves of event-triggered tracking control
شکل 3: ملاحظه می شود که شباهت بسیار زیادی بین این شکل و مقاله وجود دارد.

The outputs of the control system and reference system under ETM
شکل 4: این شکل نیز بسیار شبیه به مقاله است.

The evolution of the proposed ETM
شکل 5: حدود این شکل و رفتار کلی همانند مقاله است.

Inter-event interval of ETM
شکل 6: محدوده تغییرات این نمودار نیز شباهت زیادی به مقاله دارد.

The state response curve of the augmented system
شکل 7: این شکل شباهت زیادی به مقاله دارد
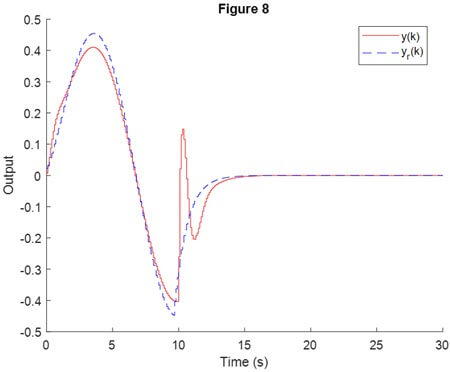
The outputs of the control system and reference system under ETM
شکل 8: این شکل نیز شباهت زیادی به مقاله دارد
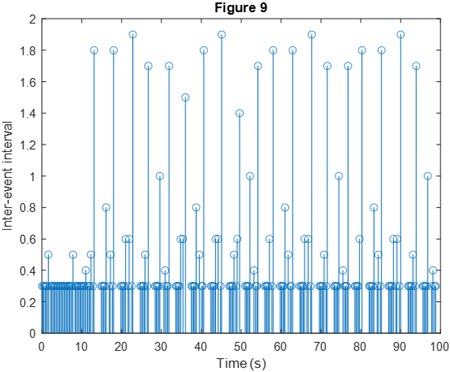
Inter-event interval of ETM
شکل 9: حدود تغییرات این شکل نیز در حدود مقاله است.
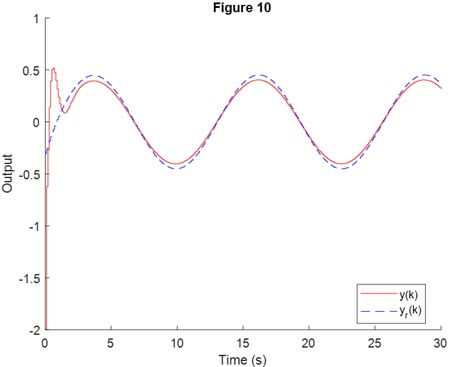
The outputs of the control system and reference system under ETM
شکل 10: این شکل نیز شباهت زیادی به مقاله دارد.

The inter-event interval under the self-triggered control strategy

The outputs of the control system and reference system under self-triggered control strategy
شکل های 11 و 12: شباهت های زیادی بین این دو شکل و مقاله وجود دارند.
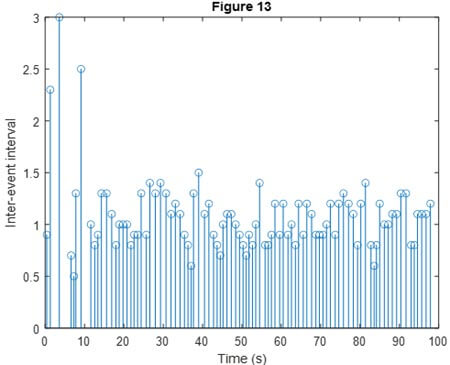
Inter-event interval of ETM
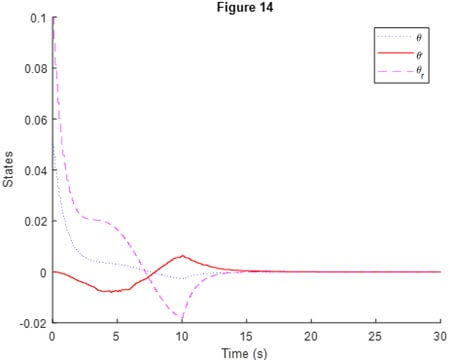
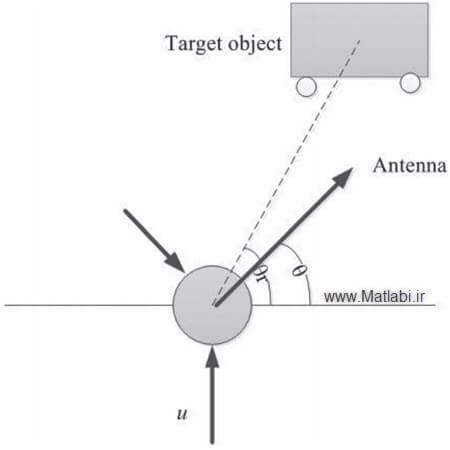
The closed-loop responses for networked angular positioning system
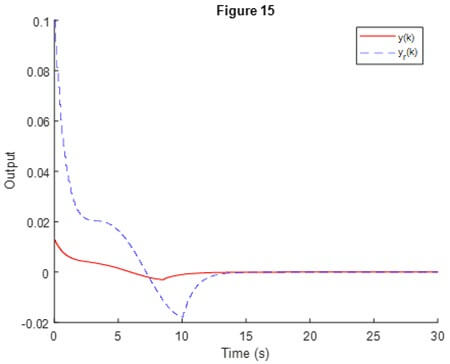
The outputs of the control system and the given reference system
شکل های 13 تا 15: این شکل ها نیز شبیه به مقاله به دست آمده اند.
شاید به موارد زیر نیز علاقه مند باشید:
- فازی تطبیقی توزیعشده با اجماع کنترل سیستمهای چندعامل غیرخطی نامشخص
- ناظر منطق فازی برای کنترل توان اکتیو و راکتیو از یک سیستم تبدیل انرژی بادی سرعت متغیر مربوط به یک سیستم ذخیره سازی فلایویل
- مقایسه تست سخت افزار با مدل های سیمولینک از ریزشبکه دانشگاه ویسکانسین
- کنترل سیستم توپ و میله با استفاده از کنترلر PID فازی
- کنترل انحراف خودرو با فیدبک خروجی Hبینهایت مقاوم با استفاده از فرمان چرخ جلو فعال
کلیدواژه:
| H∞ output tracking control, linear parameter-varying system, networked control system,event-triggered control, self-triggered control |
کنترل ردیابی خروجی H∞, سیستم متغیر خطی با پارامتر, سیستم کنترل شبکه ای, کنترل راه اندازی رویداد, کنترل خود راه انداز
شبیه سازی کنترل ردیابی خروجی Hبینهایت با رویداد و خود راهانداز برای سیستمهای متغیر خطی زمان گسسته با تاخیرهای ناشی از شبکه
طبق توضیحات فوق توسط کارشناسان سایت متلبی تهیه شده است و به تعداد محدودی قابل فروش می باشد.
سفارش انجام پروژه مشابه
درصورتیکه این محصول دقیقا مطابق خواسته شما نمی باشد،.
با کلیک بر روی کلید زیر پروژه دلخواه خود را سفارش دهید.






دیدگاهها
هیچ دیدگاهی برای این محصول نوشته نشده است.