
توضیحات
کنترل ردیابی و نمونه گیری بهینه نزدیک مبتنی بر رویداد از سیستم های غیرخطی
عنوان اصلی مقاله:
Event-based Near Optimal Sampling and Tracking Control of Nonlinear Systems
شبیه سازی در محیط ام فایل متلب انجام شده است.
دارای 3 صفحه گزارش ورد به زبان لاتین است.
این یک مقاله علمی در مورد طراحی یک کنترل کننده ردیابی نزدیک به بهینه برای سیستم های غیرخطی با استفاده از روش رویداد محور است.
توضیحات پروژه کنترل ردیابی سیستم های غیرخطی
شبیه سازی دارای دو کد متلب می باشد.
Refression_function.m
حاوی تابع رگرسیون (φ) در مرجع 11 مقاله (همانطور که در مقاله ذکر شد). مرجع 11 در فایلهای پروژه قرار گرفته است.
Main.m
فایل اصلی که شبیه سازی با آن اجرا می شود.
در گزارش شبیه سازی که به صورت لاتین تهیه شده است. در مورد شبیه سازی با متلب توضیح داده شده است.
نتایج بدست آمده از شبیه سازی با متلب
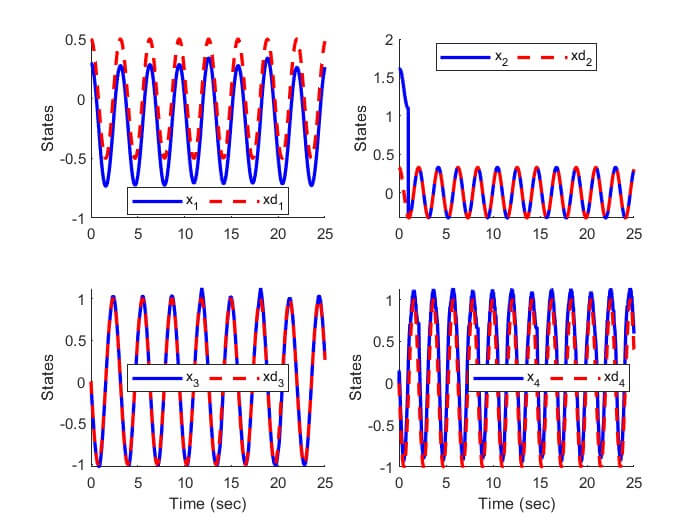
Fig. 1. System state and desired trajectories
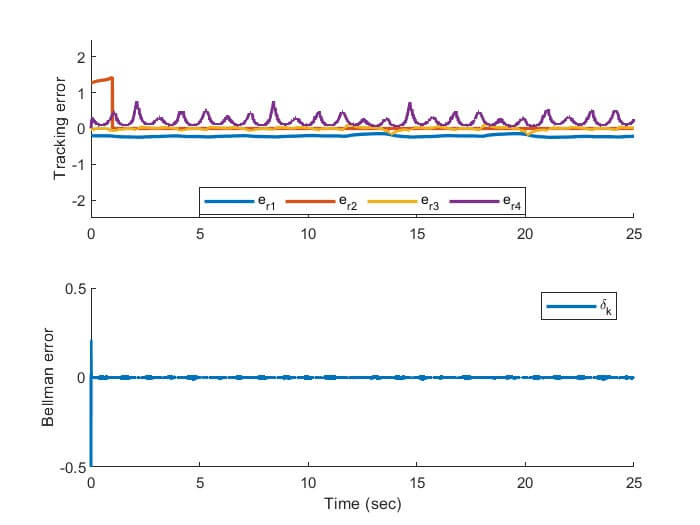
Fig. 2. Convergence of (a) Tracking error (b) event-based integral Bellman error.

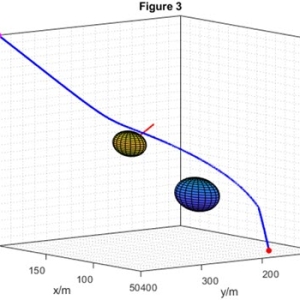
Fig. 3. Event-triggered system performance (a) Cumulative number of sampling; (b) inter-sampling instants.

Fig. 4. Convergence of NN weight estimates
همانطور که مشاهده می شود نتایج بسیار مشابه به مقاله بدست آمده است.
شاید به موارد زیر نیز علاقه مند باشید:
- کنترل ردیابی خروجی Hبینهایت با رویداد و خود راهانداز برای سیستمهای متغیر خطی زمان گسسته با تاخیرهای ناشی از شبکه
- کنترل پیشبین مدل مبتنی بر رویداد مقاوم برای سیستمهای فیزیکی سایبری تحت حملهٔ Dos
- افزایش دقت ردیابی مسیر برای ربات صنعتی با کنترل تطبیقی مقاوم
- فازی تطبیقی توزیع شده با رویداد کنترل اجماع سیستم های غیرخطی چندعامل نامشخص
- انجام پروژه کنترل غیرخطی
ترجمه چکیده مقاله:
این مقاله یک طرح کنترل ردیابی مبتنی بر رویداد تقریباً بهینه را برای سیستمهای زمان پیوسته غیرخطی ارائه میکند. به منظور طراحی همزمان فواصل نمونه برداری مبتنی بر رویداد و خط مشی کنترل، مشکل طراحی مکانیسم راه اندازی رویداد و کنترل کننده بازخورد به عنوان یک مسئله بهینه سازی حداقل حداکثر مطرح شده است. با استفاده از راه حل نقطه زینی حاصل، سیاست کنترل فیدبک و آستانه برای شرایط نمونه برداری مبتنی بر رویداد طراحی شده است. طرح کنترل پیشنهادی با تقریب راهحل معادله همیلتون-جاکوبی-ایساک (HJI) با استفاده از شبکههای عصبی مبتنی بر رویداد (NN) تحقق مییابد. وزن های NN با استفاده از یک طرح به روز رسانی تکانشی به روز می شوند. بسط تجزیه و تحلیل پایداری لیاپانوف برای سیستم دینامیکی هیبریدی تکانشی برای اثبات مرزبندی نهایی محلی خطاهای ردیابی و تخمین وزن NN استفاده می شود. علاوه بر این، رفتار آزاد Zeno مکانیسم ایجاد رویداد به همراه شبیهسازی عددی برای تایید طراحی تحلیلی تضمین شده است.
کلیدواژه:
Artificial neural networks, Optimization, Optimal control, Mathematical model, Performance analysis, Trajectory, Stability analysis
شبکه های عصبی مصنوعی, بهینه سازی, کنترل بهینه, مدل ریاضی, تحلیل عملکرد, مسیر, تحلیل پایداری
کنترل ردیابی و نمونه گیری بهینه نزدیک مبتنی بر رویداد از سیستم های غیرخطی با متلب
طبق توضیحات فوق توسط کارشناسان سایت متلبی تهیه شده است و به تعداد محدودی قابل فروش می باشد.
سفارش انجام پروژه مشابه
درصورتیکه این محصول دقیقا مطابق خواسته شما نمی باشد،.
با کلیک بر روی کلید زیر پروژه دلخواه خود را سفارش دهید.


دیدگاهها
هیچ دیدگاهی برای این محصول نوشته نشده است.