توضیحات
افزایش دقت ردیابی مسیر برای ربات صنعتی با کنترل تطبیقی مقاوم
عنوان اصلی مقاله:
Enhancing trajectory tracking accuracy for industrial robot with robust adaptive control
شبیه سازی در محیط سیمولینک متلب انجام شده است.(در متلب های 2015 تا 2018 تست و اجرا شده است)
دارای ویدیوی 9 دقیقه ای توضیحات در مورد شبیه سازی است.
ترجمه مقدمه:
یک روش کنترل تطبیقی مقاوم به طور سیستماتیک در این مقاله پیشنهاد شده است تا به طور قابلتوجهی خطاهای ردیابی رباتهای صنعتی 6 درجه آزادی (DOF) را تحت هر دو اختلالات خارجی و عدم قطعیتهای پارامتری کاهش دهد.
قانون کنترل تطبیقی مقاوم بر اساس دینامیک ربات در فضای کاری نهایی ربات فرموله شده است.
قانون کنترل با ترکیب ترم مقاوم و عبارت تطبیقی برای ردیابی مسیر مورد نظر اثر پایانی با دقت کافی در حضور اغتشاشات خارجی ناشناخته و عدم قطعیت های پارامتریک طراحی شده است.
عملکرد ردیابی مسیر کنترل پیشنهادی در نهایت بر اساس تابع لیاپانوف و لم باربالات تضمین می شود. علاوه بر این، یک قانون انطباق پارامتری آنلاین پایدار برای تخمین پارامترهای ناشناخته در قانون کنترل بر اساس برانگیختگی مداوم و تخمین باقیمانده پیشنهاد شدهاست.
نتایج آزمون برای نشان دادن اینکه کنترل تطبیقی مقاوم ترکیبی خطای ردیابی مسیر نهایی را به طور قابل توجهی در مقایسه با کنترل معمولی کاهش میدهد به دست میآید.
توضیحات پروژه ردیابی مسیر با کنترل تطبیقی مقاوم
مقاله بر روی یک ربات واقعی (اکسپریمنتال) کار کرده است و بخش اصلی آن کنترل کننده ی تطبیقی مقاوم است.
شبیه سازی در محیط سیمولینک انجام شده است و ام فایلی برای راحتی اجرا و دیدن نتایج در کنار آن قرار داده شده است. بنابراین برای اجرای شبیه سازی فقط کافیست فایل main.m اجرا شود.
مدل ربات به صورت پیش فرض از سوی برنامه نویس پیاده سازی شده است, (با رعایت ابعاد مدل ربات) و بخش اصلی که کنترل کننده آن است دقیقا مطابق با مقاله پیاده سازی شده است.
در ویدیوی همراه پروژه, سیمولینک با استناد به بخشهای مختلف مقاله تشریح شده است و در پایان با اجرای شبیه سازی, نتایج مورد بررسی قرار گرفته است.
همانطور که از نتایج مقاله پیداست, نمودارهای قرمز رنگ مربوط به روشی خارج از مقاله است و نمودار مشکی مربوط به روش پیشنهادی مقاله (که در این پروژه نمودارهای مشکی ترسیم میشود)
به دلیل ندادن معادلات ربات و همچنین تغییر مداوم اغتشاش بر سیستم, نتایج دارای تغییراتی ظاهری خواهد بود. اما شبیه سازی کاملا مطابق با روش کنترلی مقاله پیاده سازی شده است.
نمونه نتایج بدست آمده از شبیه سازی:
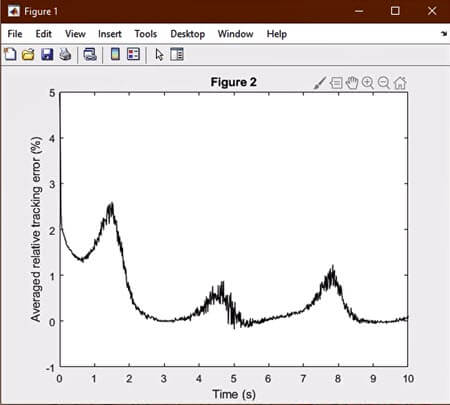
The averaged relative tracking errors of the joint angles based on the two controls
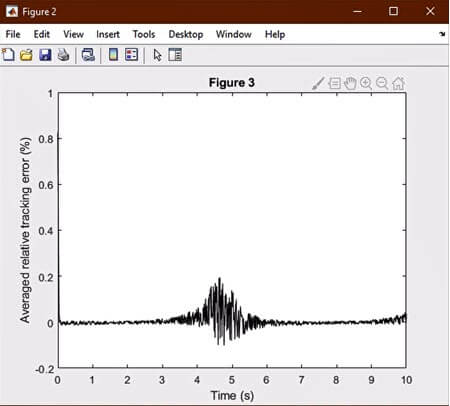
The averaged relative tracking errors of the end-effector based on two controls
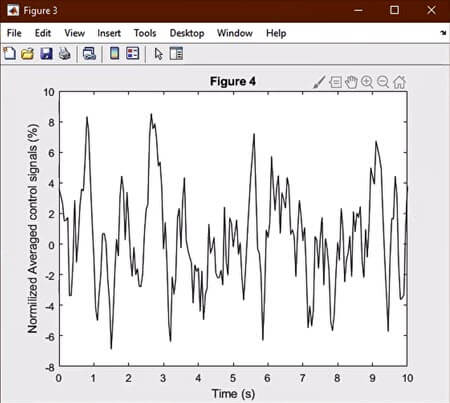
The normalized average control signals of the joints based on two controls
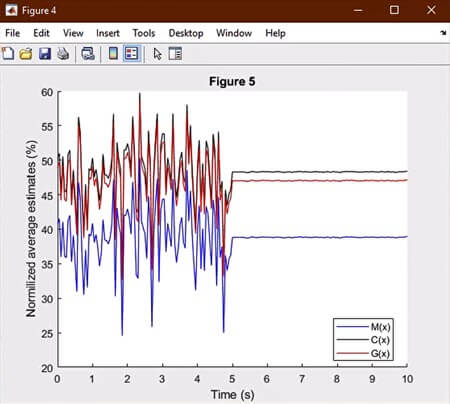
The normalized average robot parametric estimates based on the proposed parametric adaption law
شاید به موارد زیر علاقه مند باشید:
- ردیابی بهینه و کنترل مقاوم توان توربین بادی DFIG
- کنترل ردیابی خروجی Hبینهایت با رویداد و خود راهانداز برای سیستمهای متغیر خطی زمان گسسته با تاخیرهای ناشی از شبکه
- کنترل ردیابی خروجی H بی نهایت برای یک کلاس از سیستم های LPV سوئیچ شده و کاربرد آن در یک مدل موتور هوا
- یک روش طراحی کنترل کننده خطی MIMO برای بهینه سازی مقاوم و درجه دوم
کلیدواژه:
6 DOF industrial robot, Task space, Robust adaptive control, Parametric adaption, Relative tracking errors
ربات صنعتی, فضای کار, کنترل تطبیقی مقاوم, انطباق پارامتریک, خطاهای ردیابی نسبی
افزایش دقت ردیابی مسیر برای ربات صنعتی با کنترل تطبیقی مقاوم با متلب
طبق توضیحات فوق توسط کارشناسان سایت متلبی تهیه شده است و به تعداد محدودی قابل فروش می باشد.
سفارش انجام پروژه مشابه
درصورتیکه این محصول دقیقا مطابق خواسته شما نمی باشد،.
با کلیک بر روی کلید زیر پروژه دلخواه خود را سفارش دهید.






دیدگاهها
هیچ دیدگاهی برای این محصول نوشته نشده است.