توضیحات
Efficient path planning for UAV formation via comprehensively improved particle swarm optimization
شبیه سازی مقاله با الگوریتم هیبریدی PSOGWO در محیط ام فایل متلب انجام شده است.
دارای گزارش مختصر 2صفحه ای است.
توضیحات پروژه
شبیه سازی مقاله با الگوریتم PSO-GWO در چند ام فایل مختلف به شرح زیر انجام شده است:
فایل main: شبیه سازی با این فایل اجرا می شود
فایل های PSOGWO و initialization: برای حل مساله با روش PSOGWO
فایل mountainTerrain: تولید مدل کوه ها
فایل radarThreat: تولید مول پایگاه رادار
فایل objectiveFunction: تابع هدف مساله
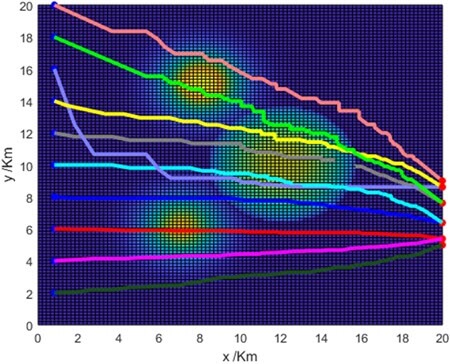
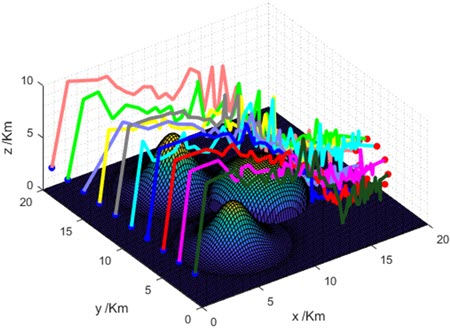
روش GWOPSO در این پروژه به بهینه سازی مسیر حرکت UAV ها با توجه به قیود زیر می پردازد:
1. پرنده ها کوتاه ترین مسیر رو طی کنند.
2. پرنده ها با کوه برخورد نکنند.
3. پرنده ها با رادار برخورد نکنند.
4. پرنده ها با یک دیگر برخورد نکنند.
این موارد طبق توضیحات مقاله در فایل objectiveFunction کدنویسی شده اند. پارامترهایی که بهینه می شوند مختصات x و y و z هر کدام از ده پرنده است که در مجموع 30 پارامتر تحت قیود بیان شده بهینه سازی می شوند.
زمان اجرای این شبیه سازی کمی طولانی هست.
نتایج بدست آمده از شبیه سازی شامل دو شکل زیر است:
شبیه سازی مقاله A 6‑DOF robot‑time optimal trajectory planning based on an improved genetic algorithm هم اکنون در فروشگاه متلبی
کلیدواژه:
hybrid Particle Swarm Optimization–Grey Wolf Optimizer, UAV formation, Path planning, Mutation strategy
شبیه سازی
Efficient path planning for UAV formation via comprehensively improved particle swarm optimization
طبق توضیحات فوق توسط کارشناسان سایت متلبی تهیه شده است و به تعداد محدودی قابل فروش می باشد.
سفارش انجام پروژه مشابه
درصورتیکه این محصول دقیقا مطابق خواسته شما نمی باشد،.
با کلیک بر روی کلید زیر پروژه دلخواه خود را سفارش دهید.






میرزایی –
مرجعی برای آموزش الگوریتم PSOGWO معرفی می کنید؟