توضیحات
Distributed receding horizon control for rotating wings unmanned aerial vehicles: a time-varying topology strategy
توزیع کنترل افق عقب برای چرخش بال های هواپیماهای بدون سرنشین: یک استراتژی توپولوژی متغیر با زمان
شبیه سازی در محیط ام فایل متلب انجام شده است.
دارای گزارش ورد 6 صفحه ای است.
چکیده:
در این مقاله یک معماری کنترل محدود توزیع شده برای حل مشکل جلوگیری از برخورد با مانع برای چرخش بال های هواپیماهای بدون سرنشین ساخته شده است. هدف از استراتژی پیشنهادی دستیابی به سازه ای انعطاف پذیر است که در صورت دسترسی به دالان های باریک ، توپولوژی می تواند به درستی سازماندهی شود. این استدلال با توسل به ایده های کنترل پیش بینی مدل (MPC) که به شما امکان می دهد به طور موثر عدم قطعیت مدل و محدودیت های فیزیکی را مدیریت کند ، به روشی قابل محاسبه ترجمه می شود.
توضیحات پروژه
الگوریتم DMPC
الگوریتم اصلی برای حل مساله ارائه شده در مقاله، DMPC است که در آن با توجه به شرایطی که به وجود می آید، الگوریتم های دیگر نیز فراخوانی می گردند. لذا با توضیح این الگوریتم آغاز به کار می نماییم.
خط 1: اگر مانعی شناسایی نشود:
در خط 5 فایل main شرایط پرنده پیشرو با توجه به موقعیت آن تعیین می شود. اگر متغیر detected = 0 باشد یعنی مانعی وجود ندارد و خط 11 کد اجرا می شود.
خط 2: نقطه ای که پرنده قرار است به آن جا برسد با توجه به معادلات 14 و 15 تعیین گردد.
در این حالت قیود از فایل constraints خوانده شده و تابع هزینه محاسبه می شود. در مورد سوال بسیار عجیبتان از تابع هدف در صفحات بعدی توضیح داده ام.
طبق معادلات 14 اگر پرنده پیشرو باشد، نقطه بعدی باید کمترین فاصله با نقطه نهایی (مقصد) را داشته باشد.
طبق معادله 15 اگر پرنده پیشرو نباشد، نقطه بعدی باید کمترین فاصله را با نقطه قبلی پرنده با شماره کمتر داشته باشد.
خط 3: با توجه به نقاط تعیین شده، معادلات بهینه سازی 17 تا 23 حل گردند.
خط 4: به منظور جلوگیری از برخورد پرنده ها ، مختصات هر پرنده در در زمان قبلی و حال ذخیره می شود.
خط 5: مختصات حال و گذشته هر پرنده به منظور جلوگیری از برخورد به پرنده های عقب تر داده می شود.
خط 6: مختصات توضیح داده شده توسط پرنده های عقب تر دریافت می شود.
خط 7: ورودی کنترلی محاسبه شده از بهینه سازی اعمال می گردد.
در خط 8 هم ورودی کنترلی محاسبه می شود و هم به سیستم اعمال می شود.
خط 8: گام زمانی به روز می گردد و به خط 2 باز می گردیم.
خط 9: اگر مانع شناسایی شود:
خط 10: موانع شناسایی می گردند (طبق داده های از پیش تعیین شده، یعنی اطلاعات موانع موجود است).
خط 11: اگر یک پرنده در محدوده آغازین مسیر بین دو مانع بود، الگوریتم LF-Agg اعمال گردد (این الگوریتم پس از اتمام DMPC توضیح داده می شود).
خط 12 و 13: محاسبه خروجی های الگوریتم LF-Agg.
خط 14: فعال سازی الگوریتم DRHC-LF.
خط 15: بازگشت به خط 7.
خط 16: اگر یک پرنده در محدوده پایانی مسیر بین دو مانع بود الگوریتم LF-Dis فعال گردد.
خط 17: خروجی های الگوریتم LF-Dis به پرنده های عقب تر ارسال شود.
خط 18: پس از خروج از محدوده مسیر بین مانع ها، مانعی شناسایی نشود:
خط 19: فعال سازی الگوریتم DRHC-LF.
ادامه توضیحات و فایل های شبیه سازی را با خرید این محصول دریافت نمایید.
همانطور که از توضیحات فوق مشخص هست برنامه اصلی به صورت خط به خط و با ذکر شماره معادله مربوطه توضیح داده شده است.
الگوریتم DHRC-LF بخش Online
به طور کلی این الگوریتم می گوید که اگر پرنده پیشرو باشد، ورودی کنترلی آن با حل معادلات 17 تا 23 به دست آید. در غیر این صورت معادلات 30 و 31 حل می گردند. ورودی کنترلی اعمال می گردد و گام زمانی به روز می شود.
الگوریتم LF-Agg
اگر دقت نمایید این الگوریتم در ورود به محدود بین دو مانع شروع به کار می کند. در واقع aggregation هم به معنی تجمیع است و یعنی زمانی که پرنده ها در یک مسیر محدود جمع می شوند.وقتی پرنده ها در دایره ورود به مسیر بین دو مانع جمع می شوند، این الگوریتم آن ها را به سمت نقطه شروع مسیر بین دو مانع هدایت می نماید.
الگوریتم LF-Dis
این الگوریتم مربوط به پراکنده شدن پرنده ها پس از خروج از مسیر بین دو مانع است. این الگوریتم به این صورت کار می کند که پرنده را مجددا به مسیر بهینه به سمت مقصد هدایت می نماید.
بخشی از گزارش این پروژه به صورت سوال و پاسخ در مورد شبیه سازی می باشد.
نتیجه شبیه سازی با متلب
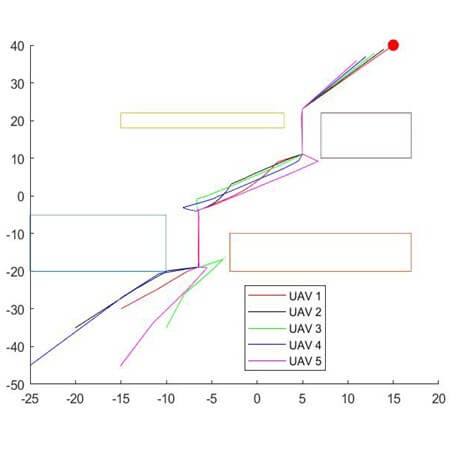
Working environment and UAV trajectories
توضیح اینکه در تصویر بالا اینطور معلوم هست که با مانع سمت چپ برخوردی وجود داشته در صورتی که اینطور نیست و با زوم کردن بر روی نمودار خروجی متلب کاملا از خط فاصله وجود دارد. یا اینکه در یک مسیر گاها قرار گرفته اند. چون پرنده ها با تقدم و تاخر حرکت کردن و در زمان های مختلف بوده , لذا حرکت و گذر از یک مسیر مشکلی بوجود نخواهد آورد و برنامه به درستی و بهینه عمل می کند.
کلیدواژه:
توپولوژی, خط سیر, جلوگیری از برخورد, هواپیماهای بدون سرنشین, سوئیچ ها, بهينه سازي, معماری کامپیوتر
Distributed receding horizon control for rotating wings unmanned aerial vehicles: a time-varying topology strategy
طبق توضیحات فوق توسط کارشناسان سایت متلبی تهیه شده است و به تعداد محدودی قابل فروش می باشد.
سفارش انجام پروژه مشابه
درصورتیکه این محصول دقیقا مطابق خواسته شما نمی باشد،.
با کلیک بر روی کلید زیر پروژه دلخواه خود را سفارش دهید.






دیدگاهها
هیچ دیدگاهی برای این محصول نوشته نشده است.