توضیحات
DESIGN OF STABILIZING SIGNALS BY USING MODEL PREDICTIVE CONTROL
طراحی پایداری سیگنال ها با استفاده از مدل کنترل پیش بین
دارای شبیه سازی با متلب و 18صفحه گزارش ورد است.
بخشی از گزارش:
مقدمه
کنترل پیش بین مدل (Model Predictive Control یا MPC) نوعی کنترل پیشرفته فرایند است که از دهه ۱۹۸۰ در صنایع فرایند، صنایع شیمیایی و پالایشگاههای نفت به کار میرود.
اخیراً از این کنترل کننده در مدلهای بالانس سیستمهای قدرت نیز استفاده شده است.
در این کنترل کنندهها از مدلهای دینامیکی فرایند، که عمدتاً از مدلهای تجربی، که با شناسایی سیستم به دست میآیند، استفاده میشود.
مهمترین مزیت MPC بهینهسازی تابع هزینه با درنظر گرفتن مقادیر آینده، میباشد.
این کار با بهینه سازی یک افق زمانی محدود اما اجرای آن تنها زمان نمونهبرداری جاری انجام میگیرد.
کنترل کننده MPC، توانایی پیش بینی رخدادهای آینده و اتخاذ اعمال کنترلی متناسب با آن را دارد.
شبیه سازی مقاله کنترل پیش بین با متلب در سایت متلبی
مدلهای به کاررفته در MPC معمولا” مدلهایی برای نشان دادن رفتار یک سیستم دینامیکی پیچیده هستند.
الگوریتم کنترل پیش بین پیچیدگی سیستم را افزایش میدهد و برای کنترل سیستمهای ساده که اغلب با کنترل کنندههای PID به خوبی کنترل میشوند استفاده از این کنترل کننده توصیه نمیشود.
از مشخصههای دینامیکی رایجی که معمولاً برای کنترل کنندههای PID مشکل ایجاد میکنند، میتوان به تآخیرهای زمانی طولانی و دینامیکهای مرتبه بالا اشاره کرد.
تغییرات متغییرهای وابسته که نتیجه تغییرات متغییرهای نابسته هستند، با استفاده از مدلهای MPC پیش بینی میشوند.
در یک فرایند شیمیایی متغییرهای نابستهای که میتوان با کنترلر تغییر داد اغلب یا نقاط تنظیم (set point) کنترل کنندههای PID رگولاتوری (فشار، فلو، دما…) هستند یا عنصر کنترلی نهایی (ولو، دمپر…).
متغییرهای نابستهای که نمیتوان با کنترل کننده تنظیم کرد به عنوان اغتشاش به کار میروند.
متغییرهای وابسته در این فرایندها دیگر اندازه گیریهایی هستند که یا اهداف کنترلی را نشان میدهند یا محدودیتهای کنترلی.
کنترل کننده MPC با استفاده از اندازه گیریهای فعلی از سیستم تحت کنترل، حالت دینامیکی فعلی فرایند، مدلهای MPC و اهداف و محدودیتهای متغییر فرایند، تغییرات آتی متغییرهای وابسته را محاسبه میکند.
این تغییرات به گونهای محاسبه میشوند که متغییرهای وابسته نزدیک به هدف بمانند و محدودیتها روی متغییرهای نابسته و وابسته رعایت شود.
معمولاً MPC تنها اولین تغییر در هر متغییر نابسته را برای اجرا میفرستد و محاسبه را برای تغییر بعدی تکرار میکند.
با وجود آنکه بسیاری از فرایندهای واقعی خطی نیستند اغلب می توان آنها را در بازه کوچکی خطی در نظر گرفت.
روشهای MPC خطی در بیشتر کاربردها با مکانیسم فیدبک به کار می روند که خطاهای پیش بینی ناشی از عدم تطبیق بین مدل و فرایند را جبران می کند.
در کنترل کننده های پیش بین که تنها از مدلهای خطی تشکیل می شوند اصل برهم نهی (جمع آثار) جبر خطی امکان می دهد اثر تغییرات متغییرهای نابسته چندگانه برای پیش بینی پاسخ متغییر وابسته با هم جمع شوند.
با این کار مسئله کنترلی به یک سری محاسبات جبری ماتریسی مستقیم ساده می شود که سریع و مقاوم هستند.
هنگامي كه مدلهاي خطي به اندازه كافي براي نشان دادن غيرخطي بودن واقعي مدل دقيق نيستند از روشهاي گوناگوني مي توان استفاده كرد.
در برخي موارد مي توان از تغيير متغييرهاي فرايند پيش و/يا پس از مدل خطي براي كاهش غير خطي بودن استفاده كرد.
فرايند را مي توان با MPC غير خطي كه مستقيما” از مدل غير خطي استفاده مي كند كنترل كرد.
مدل غير خطي مي تواند به شكل يك برازش منحني تجربي (مانند شبكه هاي عصبي مصنوعي) يا يك مدل ديناميكي دقيق بر مبناي توازن بنيادي جرم و انرژي باشد.
مدل غير خطي را مي توا ن براي به دست آوردن فيلتر كالمن و يا استفاه از آن در MPC خطي، خطي سازي كرد.
چرا کنترل پیشبین؟
از دلایلی که برای استفاده از کنترل پیشبین میتوان به آن اشاره کرد، وجود تاخیر و کندی در سیستمها میباشد.
در سیستمهای تاخیر دار به دلیل این که اطلاعات خروجی سیستم دیر به دست کاربر میرسند، لذا به منظور اینکه از جهت گیریهای ناخواسته خروجی جلوگیری شود، لازم است آینده پیشبینی شود.
از طرفی به دلیل اینکه در کنترل پیشبین غیرخطی محاسبات زیادی انجام میشود، لذا باید زمان نمونهبرداری به حدی کافی باشد که پروسسور بتواند محاسبات لازم را انجام دهد.
لذا در سیستمهای کند همانند سیستمهای فرآیندی با زمان نمونه برداری زیاد به دلیل فرصت کافی برای انجام محاسبات، استفاده از این کنترلکننده قابل قبول است.
الگوریتمهای متداول کنترل پیشبین
تاکنون انواع الگوریتمهای متفاوتی برای کنترل پیشبین ارائه شدهاند، که در این کنترلکنندهها روند همانند قبل یعنی پیشبینی، بهینهسازی و سیگنال کنترلی میباشد. این کنترلکنندهها به شرح زیر میباشند:
- کنترل کننده ماتریسی دینامیکی (DMC)
- کنترل خود تنظیم پیشبین گسترش یافته (EPSAC)
- کنترل پیشبین تعمیم یافته (GPC)
- کنترل الگوریتمیک مدل(MAC)
- کنترل تابعی پیشبین (PFC)
- کنترل ماتریسی دینامیکی کنترل (QADMC)
- بهینهسازی حلقه بازترتیبی (SOLP)
- و …
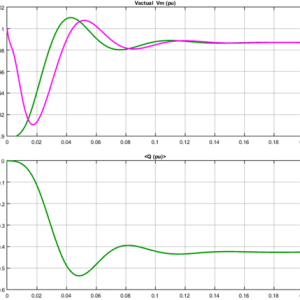
نتایج شبیه سازی با متلب
شبیه سازی مربوط به ماشین A
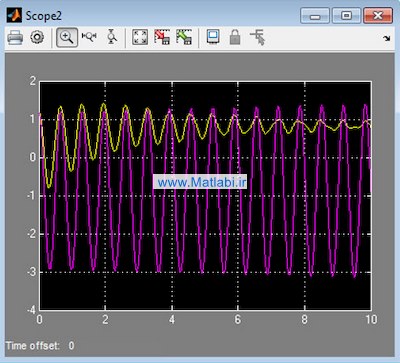
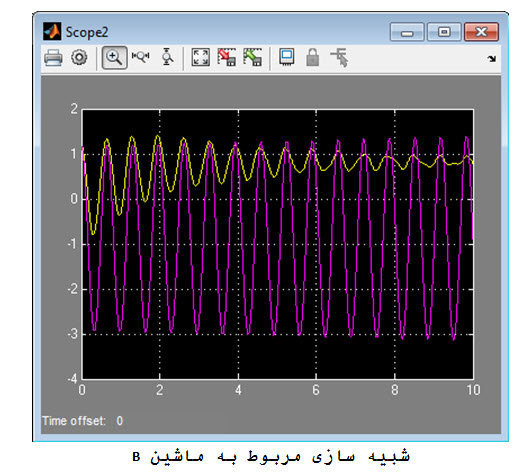
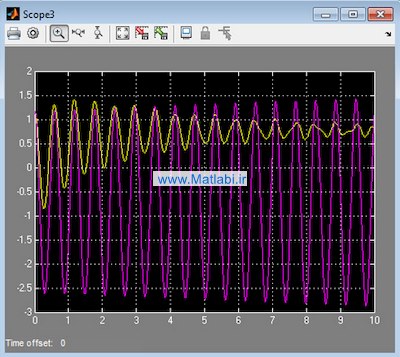
شبیه سازی مربوط به ماشین B
همانطور که مشاهده می شود، پایداری با استفاده از کنترل پیش بین به خوبی محقق می شود.
کلید واژه :
Model Predictive Control, Generalized, Predictive Control, Low-Frequency Oscillations, PSS, SVC
شبیه سازی
DESIGN OF STABILIZING SIGNALS BY USING MODEL PREDICTIVE CONTROL
طبق توضیحات فوق به تعداد محدودی قابل فروش می باشد.
سفارش انجام پروژه مشابه
درصورتیکه این محصول دقیقا مطابق خواسته شما نمی باشد،. با کلیک بر روی کلید زیر پروژه دلخواه خود را سفارش دهید.