توضیحات
طراحی مشاهده گر حالت لغزشی تطبیقی دکوپله برای توربین های بادی در معرض خطاهای همزمان در حسگرها و محرک ها
عنوان مقاله:
Decoupling Adaptive Sliding Mode Observer Design for Wind Turbines Subject to Simultaneous Faults in Sensors and Actuators
شبیه سازی در محیط ام فایل و سیمولینک متلب 2016 انجام شده است.
دارای گزارش مختصر 10 صفحه ای از اسکریپت ها و سیمولینک تهیه شده به همراه نتایج بدست امده است.
ترجمه چکیده مقاله:
این مقاله یک رویکرد مبتنی بر ناظر حالت لغزشی (ASMO) را برای توربینهای بادی که در معرض خطاهای همزمان در حسگرها و محرکها قرار دارند، پیشنهاد میکند.
روش پیشنهادی امکان تشخیص همزمان خطاهای محرک و سنسور را بدون نیاز به اجزای سخت افزاری اضافی را ممکن می سازد. علاوه بر این، تغییرات سرعت باد به عنوان اختلالات ناشناخته در نظر گرفته می شود، بنابراین نیاز به اندازه گیری یا برآورد دقیق را از بین می برد.
ASMO پیشنهادی تخمین و بازسازی دقیق حالات و اختلالات توصیفگر را امکان پذیر می کند.
طرح پیشنهادی اصل جداسازی را اجرا می کند تا امکان استفاده از کنترل کننده اسمی در شرایط معیوب را فراهم کند. تحمل خطا با اجرای یک طرح تصحیح سیگنال برای بازیابی رفتار به دست می آید.
عملکرد روش پیشنهادی با استفاده از یک مدل معیار توربین بادی 4.8 مگاواتی که در معرض خطاهای مختلف است، تأیید میشود.
تحلیل مونت کارلو نیز برای ارزیابی بیشتر قابلیت اطمینان و استحکام رویکرد پیشنهادی در حضور خطاهای اندازهگیری انجام میشود.
سادگی، سهولت اجرا و خاصیت جداسازی از جمله ویژگیهای مثبت رویکرد پیشنهادی است.
توضیحات پروژه طراحی مشاهده گر مودلغزشی تطبیقی
پوشه های YALMIP و sedumi برای یافتن ماتریس های مجهول مشاهده گر می باشند که در کنار ام فایل و سیمولینکها آورده شده است.
برای اجرای شبیه سازی فقط با اجرای ام فایل Main کل برنامه اجرا شده و نتایج ظاهر خواهد شد.
در گزارش توضیح خطوط برنامه متلب به صورت زیر آورده شده است:
خط 59: حل مساله بهینه سازی و یافتن ماتریس های K، T، L، J و Z.
خطوط 61 تا 67: معادلات 19 و 20 و یافتن مقادیر ماتریس های P و Q.
دو خط بالا فقط جهت آشنایی شما از نحوه تهیه گزارش است.
در زیر به صورت مختصر فایلهای سیمولینک را برای حالت های مختلف معرفی مینماییم:
- مدل سیمولینک sim1_nofault
این مدل سیمولینک برای حالتی است که هیچ خطایی به سیستم اعمال نمی شود.
- مدل سیمولینک sim2_fault
این مدل شبیه سازی با فالت ولی بدون تخمین گر فالت می باشد.
- مدل سیمولینک sim3_fault_ftc
مدل با فالت و هم چنین تخمین گر خطا.
نتایج شبیه سازی با متلب
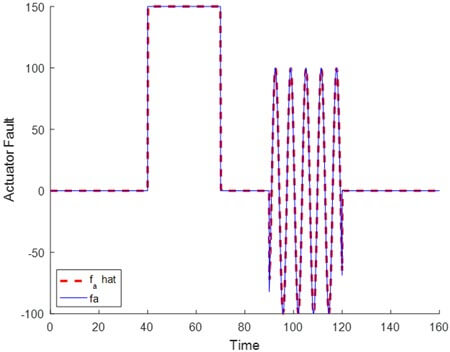
با اجرای شبیه سازی، نتایج زیر حاصل می شود. ملاحظه می شود که نتایج خیلی به مقاله نزدیک شده اند. تفاوت هایی که وجود دارد برای این است که مقاله تمام مقادیر را در اختیار قرار نداده و برخی از آن ها تخمینی می باشند. هم چنین دقت کنید که نتایج تخمین خطاها خیلی بهتر شده اند و این به دلیل استفاده از تابع tanh به جای sign است.
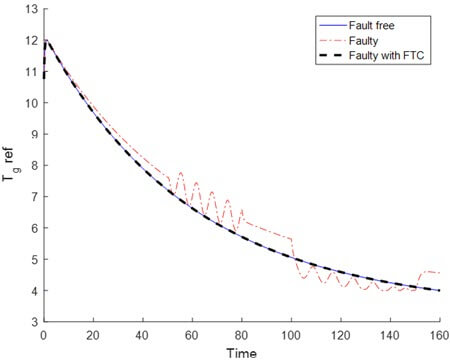
The generator reference torque
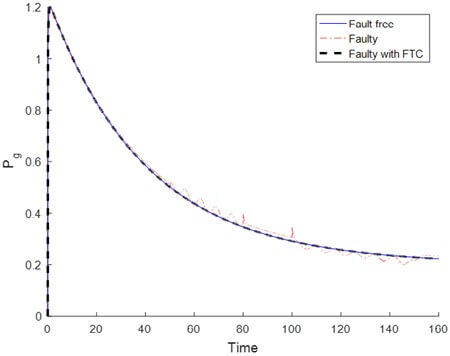
The generated power

Actual and estimated sensor fault
Actual and estimated sensor fault
شاید به موارد زیر نیز علاقه مند باشید:
- RNGA مبتنی بر پیکربندی سیستم کنترل برای فرآیندهای چندمتغیره
- پخش بار اقتصادی سیستم تولید همزمان برای قرارداد دو جانبه فیزیکی با استفاده از الگوریتم ژنتیک
- بررسی صورت ساختگی و محرک چهره انسان مورد استفاده در پارادایم BCI
- کنترل مود لغزشی مبتنی بر مشاهده گر اغتشاش خطی برای سیستم های تعلیق فعال با عملگر غیر ایده آل
کلیدواژه:
Fault tolerant control, horizontal axis wind turbines, Monte-Carlo analysis, principle of separation, simultaneous faults, sliding mode observer
کنترل تحمل خطا, توربین های بادی محور افقی, تحلیل مونت کارلو, اصل جداسازی, خطاهای همزمان, مشاهده گر حالت لغزشی
طراحی مشاهده گر حالت لغزشی تطبیقی دکوپله برای توربین های بادی در معرض خطاهای همزمان در حسگرها و محرک ها با متلب
طبق توضیحات فوق توسط کارشناسان سایت متلبی تهیه شده است و به تعداد محدودی قابل فروش می باشد.
سفارش انجام پروژه مشابه
درصورتیکه این محصول دقیقا مطابق خواسته شما نمی باشد،.
با کلیک بر روی کلید زیر پروژه دلخواه خود را سفارش دهید.






دیدگاهها
هیچ دیدگاهی برای این محصول نوشته نشده است.