
توضیحات
حمل و نقل بار مشارکتی با دو کوادروتور با استفاده از کنترل تطبیقی
عنوان اصلی مقاله:
Cooperative Load Transportation With Two Quadrotors Using Adaptive Control
شبیه سازی در محیط ام فایل متلب انجام شده است.
دارای گزارش ورد 4 صفحه ای می باشد.
توضیحات پروژه کنترل تطبیقی
در پوشه مربوط به شبیه سازی با نام سیمولیشن، 5 پوشه دیگر قرار دارد که هر کدام مربوط به یکی از ماموریت های در نظر گرفته شده در مقاله است.
نکته: این مقاله یک کار عملی است و بنابراین برخی موارد آن را در شبیه سازی نمیتوان پیاده سازی نمود. با این حال تمام توضیحات مقاله به کار گرفته شده و نمودارهای به دست آمده به طور کلی به نتایج مقاله بسیار نزدیک هستند.
در هر پوشه 2 فایل وجود دارد:
فایل main که شبیه سازی را اجرا کرده و نتایج را رسم می نماید.
فایل system_equations:
در این فایل تمام معادلات لازم در مقاله قرار داده شده است. برای نمونه فایل موجود در پوشه 1 در گزارش ورد این پروژه, توضیح داده شده و سپس تفاوت سایر پوشه ها ذکر شده است.
در زیر بخشی از توضیحات در گزارش ورد آورده شده است:
خطوط 6 تا 16: مقادیر ثابت مساله که در مقاله داده شده است. برخی از مقادیر هم داده نشده که مقادیری از خودم قرار دادم.
ورودی این کد s است که شامل 50 متغیر حالت می باشد. در خطوط 19 تا 39 نام گذاری این متغیرها انجام شده است. نام گذاری به گونه ای است که به راحتی با مقاله قابل تطابق می باشد.
خطوط 42 تا 50: معادله 4 مقاله
خطوط 53 تا 72: مسیر مرجع ماموریت 1 و مشتقات آن با توجه به معادله 26 مقاله.
خطوط 75 و 76: معادله 3 مقاله.
خطوط 79 تا 81: معادله 6 مقاله.
…
خطوط 157 تا 159: خروجی های فایل که مشتقات مرتبه اول متغیرهای حالت هستند.
تفاوت های سایر پوشه ها
در پوشه 2 مقدار20 درصد عدم قطعیت به پارامترهای خطوط 10 تا 12 اضافه شده است.
در پوشه 3 اغتشاش باد به خط 154 اضافه شده است که به صورت نویز رندوم با میانگین 1 است. دقت کنید در پروژه عملی توضیح داده شده در مقاله این کار با افزودن یک جرم به بالای دو کوادروتور انجام شده است ولی در شبیه سازی امکان این وجود ندارد.
در پوشه 4: مسیر حرکت دایره ای شده است. در مقاله گفته شده این کار برای عبور از مانع می باشد ولی در شبیه سازی امکان افزودن مانع وجود ندارد زیرا توضیحات فرمولی در مورد آن وجود ندارد.
در پوشه 5: در خطوط 17 تا 19 یک مقداری به جرم M پس از زمان 30 ثانیه افزوده می شود. طبق توضیحات مقاله در ابتدا یک جرم به یک طرف میله و سپس یک جرم به طرف دیگر میله اضافه می گردد ولی در شبیه سازی اصلا امکان این وجود ندارد.
نتایج شبیه سازی با متلب
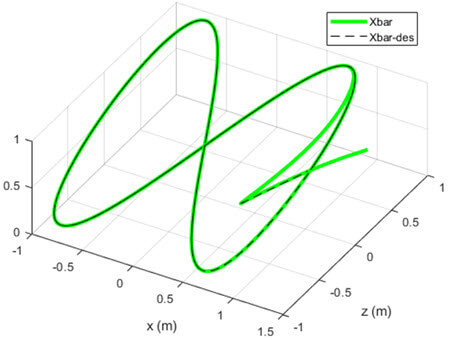
شرایط اولیه در هر اجرا به صورت تصادفی تعیین می شوتد (خط 7 در فایل main). برای نمونه نتایج ماموریت 1 را نشان می دهیم. ملاحظه می شود به خوبی مسیر مرجع تعقیب شده و نتایج نزدیک مقاله است. اغتشاشات نموداهای مقاله به خاطر این است که پروژه عملی می باشد و در شبیه سازی خیلی از آن اغتشاشات و نویزها را نداریم. بنابراین نمودارهای شبیه سازی بدون نوسان شده اند.
خطاها هم ملاحظه می شود که بسیار کم هستند.
برای هر 5 ماموریت، همین نمودارها رسم می گردند:

خطای ردیابی برای مرکز جرم بار با استفاده از کنترل کننده تطبیقی تحت شتاب
خطای ردیابی برای مرکز جرم بار با استفاده از کنترل کننده تطبیقی تحت شتاب

معیار خطا
شاید به موارد زیر نیز علاقه مند باشید:
- کنترل مشارکتی مقاوم به خطا پهپادهای در معرض خطاهای دائمی و متناوب
- مدلسازی و کنترل تطبیقی کوادروتور
- کنترل مشارکتی بهینه داده محور برای تیم کوادروتور با داینامیک ناشناخته
- کنترل تحمل پذیر خطا/خسارت یک وسیله نقلیه هوایی بدون سرنشین هلیکوپتر کوادروتور با استفاده از کنترل تطبیقی مدل مرجع و PID زمانبندی شده
- تشخیص محل دقیق خطا در خطوط انتقال با الگوریتم مورچگان با استفاده از متلب
کلیدواژه:
Multi-agent systems, payload, cable-suspended, UAV-formation control, nonlinear control, aerial robotics
سیستم های چند عاملی, کنترل مشارکتی پهپاد, کنترل غیرخطی, رباتیک هوایی
شبیه سازی حمل و نقل بار مشارکتی با دو کوادروتور با استفاده از کنترل تطبیقی با متلب
طبق توضیحات فوق توسط کارشناسان سایت متلبی تهیه شده است و به تعداد محدودی قابل فروش می باشد.
سفارش انجام پروژه مشابه
درصورتیکه این محصول دقیقا مطابق خواسته شما نمی باشد،.
با کلیک بر روی کلید زیر پروژه دلخواه خود را سفارش دهید.






دیدگاهها
هیچ دیدگاهی برای این محصول نوشته نشده است.