
توضیحات
CONTROLLER DESIGN BASED ON MODEL PREDICTIVE CONTROL FOR A NONLINEAR PROCESS
کنترل پيشبين مدل يا بر مبنای مدل به هفتاد سال پيش برمیگردد و پس از آن به سرعت پیشرفت نموده است.
عبارت کنترل پیش بین بیانگر استراتژی کنترلی خاصی نمیباشد، بلکه دربرگيرنده رنج وسیعی از روش های کنترلی است که یک مدل صریح و روشن از پروسه مورد نظر را جهت بدست آوردن سیگنال کنترل با مينيموم کردن يک تابع هدف بکار میگيرد.
اين روشها منجر به طراحی کنترلکنندههايی میشود که ساختارهايی مشابه دارند و درجههای آزادی مناسبی را معرفی مینمايند.
آنچه که در تمام خانواده کنترل پيشبين وجود دارد، عبارت است از:
- استفاده صريح از يک مدل برای پيشبينی خروجی پروسه در لحظات آينده (افق)؛
- محاسبات مينيمومسازی يک توالی کنترلی در يک تابع هدف؛
- يک استراتژی کاهشی؛ تا با ادامه روند آن، سيکنال کنترلی بهينه را در هر لحظه محاسبه و به سيستم اعمال نماييم.
در واقع مبنای کنترل پيشبين مدل استفاده از مدل سيستم برای پيشبينی آينده است.
با داشتن ورودیهای قبلی و خروجیهای قبلی يک سيستم میتوان خروجی آينده را تخمين زد.
مدل به دست آمده خروجی لحظات بعدی را به صورت تابعی از ورودیها محاسبه میکند.
بنابراين با تغيير ورودیهای سيستم میتوان خروجیهای آينده سيستم را به سمت خروجیهای مطلوب سوق داد.
در اين پروژه از کنترل پيشبين مدل شبکه عصبی که مدلی غيرخطی است، استفاده شده است.
در اين فصل نيز به عنوان مقدمه کار، به بررسی کنترل پيشبين مدل خطی، به دليل تشابه ساختاری با نوع غيرخطی آن، میپردازيم.
در کنترل پيشبين مدل خطی، سيستم با مدل خطی تقريب زده میشود، که اين مدل میتواند پاسخ ضربه سيستم، پاسخ پله، مدل فضای حالت و يا تابع تبديل گسسته سيستم باشد.
پيش از معرفی کنترل پيشبين مدل، به طور مختصر اهداف کلی کنترلی که در هر کنترلکنندهای حداقل يکی از آنها دنبال میشود، ارائه میگردد.
سپس به لزوم استفاده از کنترل پيشبين، کاربردها، مزايا و مشکلات استفاده از آن اشاره شده است.
در ادامه استراتژی کنترل پيشبين مدل، اجزای الگوريتمهای آن و برخی از الگوريتمهای کنترل پيشبين مدل معرفی میشود و در نهايت به دليل وابستگی اين کنترلکننده به مدل، مختصری به بحث شناسايی و مدلسازی میپردازيم.
اهداف کلی کنترلی
به طور کلی ما از هر روش برای کنترل استفاده کنيم، يک سری اهداف کنترلی را دنبال خواهيم کرد که آن هدف، ما را به سمت استفاده از کنترلکننده خاصی سوق میدهد.
از جمله آنها میتوان به موارد زير اشاره نمود:
– پايداری
– رديابی (حذف حالت های گذرا، صفر کردن خطا، و …)
– حذف اثر اغتشاش
– کاهش حساسيت
– افزايش مقاومت )بحث کنترل مقاوم نیز با توجه به همین کاربرد کنترلکنندهها مطرح شده است.(
– هزينه کنترلی: یک کنترلکننده حتی اگر بتواند بسیاری از مشکلات کنترلی ما را حل نماید اما در موازنه آن با هزینه به درصد مطلوبی نرسد، در عمل کاربرد چندانی برای ما نخواهد داشت.
لزوم استفاده از کنترل پيشبين
بحث کنترل پيشبين در دو جا مورد توجه قرار میگيرد:
اولاً در بحث سيستم های تأخيردار، که در اين حالت برای يافتن خروجی که با تأخير به ما میرسد، از کنترل پيشبين استفاده مینماييم.
فرآيندهايی چون پيشبينی ترافيک، پيشبينی وضعيت آلودگی هوا و … از اين جمله میباشند.
در اين کاربرد کنترل پيشبين به ما کمک خواهد کرد تا از پيشآمدن چنين وقايعی جلوگيری نموده و يا اينکه قبل از پيشآمدن آن به يافتن راهکاری جهت حل آن و به عبارتی کنترل آن بپردازيم.
دوماً در بحث خروجی آتی سيستم برای تنظيم الگوريتم کنترلی، نيز برای اينکه بتوانيم خروجی آتی سيستم را به سمت دلخواهمان سوق دهيم، الگوريتم کنترلی را بايد به گونهای طرحريزی کنيم که بتواند سيگنال کنترلی مطلوب را برای رسيدن به اين خروجی، به سيستم بدهد.
در اينجاست که بحث کنترل پيشبين مطرح و لزوم استفاده از آن به ميان میآيد. برای فهم بيشتر مثالی ارائه میکنيم؛
فرض کنيد معادله ديفرانسيلی بصورت روبرو داشته باشيم: u(t)=y(t+1)-y(t)+u(t-1) برای يافتن u(t) بايد طرف دوم معادله را داشته باشيم.
u(t-1) که مربوط به زمان پيشين است، پس آنرا در اختيار داريم.
y(t) هم که خروجی در همين لحظه است که قابل دسترسی است.
حال y(t+1) که خروجی آتی سيستم است را بايد به گونه ای هدايت کنيم که سيگنال کنترلی یعنی u(t)، مقدار مورد نظر شود.
پس به کنترلری نيازمنديم که خروجی آتی سيستم را به نحوی که مطلوب است، پيشبينی نموده تا بتوانيم سيگنال کنترلی مورد نظر را يافته و به سيستم اعمال نماييم.
کاربردها و مزايای کنترل پيش بين
از بين روشهای مختلف کنترلی، کنترل پيش بين را برگزيديم.
در حال حاضر کنترل پيشبين به طور موفقيتآميزی در پروسههای مختلف بکار میرود؛ نه تنها در پروسههای صنعتی، بلکه در رنج وسيعی از پروسههای دربرگيرنده کنترل کننده های رباتها در تکنيکهای بيهوشی، بخشهايی از صنعت سيمان، در خشک کردن برجها، در بازوهای رباتها، ستونهای تقطير، فرآیندهای pvc، ژنراتورهای بخار و… بکار میرود.
بازدهی خوب در اين کاربردها، قابليت بالای MPC را در کنترل سيستم تحت هر موقعيتی، حتی در شرايط سخت نشان میدهد.
MPC نسبت به ديگر روشها مزايايی را ارائه میدهد، که برجسته ترين آنها عبارت است از:
- کنترل پيشبين برای کسانی که دارای اطلاعات کمی نسبت به کنترل میباشند بسيار جالب است، زيرا دارای درکی مبتنی بر حس و تنظيم نسبتاً ساده ای میباشد.
- اين کنترلکننده برای کنترل مجموعه وسيعی از فرايندها بکار میرود؛ چه آنهايی که دارای ساختار ديناميکی ساده هستند، چه آنهايی که دارای ديناميک پيچيدهاند و نيز سيستم هايی که تأخير طولانی دارند و يا نامينيمم فاز يا ناپايدارند.
- به سادگی قابل تعميم از سيستمهای تک متغيره به چند متغيره هستند.
- ذاتاً جبرانکننده زمانهای مرده است.
- كنترل پيشخور را به عنوان يك راه حل جهت جبران اغتشاشات قابل اندازهگيري معرفي میكند.
- کنترلکنندههای حاصله از اين روش، بهسادگی برای قانون کنترلخطی، قابل پيادهسازی است.
- اين کنترلکننده برخوردی روشمند با قيود در حين طراحي دارد. بدين ترتيب که با ورود هر قيد جديد به مسئله، با وارد کردن آن به تابع هدف، در طول طراحی آن را مدنظر قرار میدهد.
- اين کنترلکننده براي فرايندهايي چون روبات ها يا پروسههای Batch كه در آنها سيگنال مرجع شناخته شده است، بسيار مفيد است.
- بطور کلی اين کنترلکننده از روشی اصولی پيروی میکند که پذيرای گسترشهای آتی است ]4[.
علاوه بر مزايای ارائه شده، اين کنترل کننده با مشکلاتی نيز روبروست که در بخش (2.5) به آن میپردازيم.
مشکلات استفاده از کنترل پيشبين
هر کنترلکننده علاوه بر داشتن مزايايی که باعث انتخاب آن میشود، با مشکلاتی نيز روبروست که باعث محدود شدن کاربردهای آن میشود و يا ما را بر آن میدارد که هنگام استفاده از آن، شروط و قيودی را رعايت نمائيم که از جمله آنها به موارد زير میتوان اشاره نمود:
– اگرچه پياده سازی قانون کنترل بدست آمده از کنترل پيشبين ساده است و محاسبات کمی دارد، اما استخراج و استنتاج آن بسيار پيچيده تر از يک PID کلاسیک است.
اگر ديناميک فرايند تغيير نکند، بدست آوردن قانون کنترل میتواند از قبل صورت گيرد، اما در حالت کنترل تطبيقی بايستی همه محاسبات در هر زمان نمونه برداری انجام شود.
همچنين وقتی که قيود مورد توجه قرار میگيرند، محاسبات قدری پيچيده تر خواهد شد، البته امروزه با قدرت محاسباتی بالا، اين مسئله يک مشکل اساسی محسوب نمیشود.
– بزرگترين عيب و مشکل کنترل پيشبين اين است که بايد يک مدل مناسب از فرايند موجود باشد.
واضح است که مزيتهای اشاره شده در این فصل، تحت تأثير اختلافی که بين مدل واقعی و مدلی که مورد استفاده قرار گرفته است، وجود دارد.
در عمل نيز اثبات شده است علارغم نقايص اوليه کنترل پيشبين، در بعضی از مفاهيم کليدی مانند پايداری و مقاوم بودن، اين روش يک استراتژی معقول برای فرآيندهای صنعتی میباشد.
– با وجود قابليت بالای کنترل پيشبين در پايدارسازی سيستم های ناپايدار، تأخيردار و نامينيموم فاز، اثبات پايداری در آنها مشکل میباشد.
استراتژی کنترل پيشبين مدل
بر خلاف کنترل کلاسيک که تنها از اطلاعات فعلی و گذشته استفاده میکند، کنترل پيشبين اطلاعات آينده را نيز در نظر میگيرد.
به عنوان مثال در کنترل تناسبی مقدار خطای فعلی با بهره ثابت به عنوان سيگنال کنترل تعيين میشود.
کنترلی که اپراتورها بر روی سيستمهای فرآيندی انجام میدهند ذاتاً بر اساس پيشبينی وقايع آينده استوار است.
اپراتور از وضعيت فعلی و گذشته کوتاه مدت سيستم میداند که خروجی سيستم به چه سمتی در حال حرکت است و با اين روند در آينده نزديک به کجا خواهد رسيد.
در صورتی که بخواهد خروجی آينده را به مقدار مطلوب برساند، از روی آن مدل، مقدار ورودی را که بايد از اين به بعد به سيستم اعمال شود، تعيين میکند.
به اين ترتيب يک رشته ورودی تعيين میکند که اولين مقدار آن اکنون بايد به سيستم اعمال شود و ساير مقادير، ورودیهای آينده سيستم هستند.
در لحظات بعد نيز، رشته ورودی جديد را تعيين میکند و اولين عنصر اين رشته را به سيستم اعمال میکند.
کنترل پيشبين مدل سعی میکند همين روند را به صورت رياضی اجرا کند.
ابتدا يک مدل رياضی از سيستم به وجود میآيد که میتواند با توجه به ورودیهای قبلی ![]() و خروجیهای قبلی
و خروجیهای قبلی ![]() خروجی سيستم در آينده نزديک
خروجی سيستم در آينده نزديک ![]() را پيشبينی کند.
را پيشبينی کند.
اين مدل در واقع بيانگر تجربه اپراتور از سيستم است.
در مرحله بعد اپراتور با توجه به خطای بين خروجی مطلوب آينده و خروجی پيشبينی شده برای آينده، مقدار سيگنال ورودی را مشخص میکند.
در کنترل پيشبين مدل، اين کار توسط بهينهسازی انجام میشود.
بهينهسازی انجام شده سعی در کاهش خطای زمانهای آينده دارد.
معمولاً تابع هزينه يک تابع مربعی از خطای رديابی آينده در نظر گرفته میشود که در آن خطا تفاضل خروجی مطلوب و خروجی پيشبينی شده ![]() است.
است.
برای رسيدن به کمترين مقدار تابع هزينه ورودیهای آينده ![]() میتواند تغيير کند.
میتواند تغيير کند.
نهايتاً در اين بهينهسازی مقدار سيگنالهای کنترل آينده ![]() تعيين میشود.
تعيين میشود.
يک رشته از ورودیهای آينده به دست میآيد که با اعمال اين رشته به سيستم، خروجی به سمت خروجی مطلوب خواهد رفت.
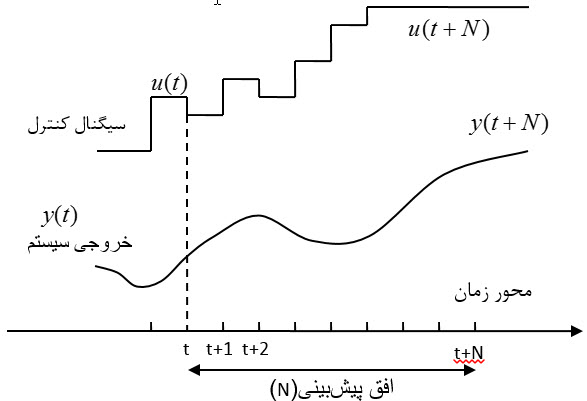
شکل 1: ساختار کنترل پیش بین
از اين رشته به دست آمده تنها مقدار اول آن ![]() به سيستم اعمال میشود و بقيه آن بدون استفاده باقی میماند.
به سيستم اعمال میشود و بقيه آن بدون استفاده باقی میماند.
در لحظه بعدی مجدداً اين کار از ابتدا اجرا میشود (کنترل افق کاهنده).
بقيه عناصر رشته بدون استفاده میمانند زيرا در لحظه بعدی (t+1) کل عمليات از ابتدا تکرار میشود.
در عمل چون پيشبينیهای بلند مدت از سيستم غير ممکن است، زمان پيشبينی به مقدار مشخصی محدود میشود.
تمام محاسبات مربوط به آينده تا اين زمان انجام میشود و اين زمان را افق پيشبينی مینامند.
در شکل(5-1) اين مقدار با ![]() نشان داده شده است.
نشان داده شده است.
همچنين سيگنال کنترل آينده که در نظر گرفته میشود نيز محدود به افق کنترل ![]() میشود.
میشود.
بعد از افق کنترل، مقدار سيگنال کنترل ثابت در نظر گرفته میشود.
افق کنترل میتواند کمی بيشتر از نصف افق پيشبينی در نظر گرفته شود.
مزيت روش خطی اين است که بهينهسازی گفته شده حل تحليلی دارد و جواب بهينهسازی يعنی سيگنال کنترل بهينه را میتوان با عمليات ماتريسی تعيين کرد.
اما در حالت غير خطی برای حل بهينهسازی، تنها میتوان از روشهای عددی بهينهسازی استفاده کرد.
علاوه بر کاربرد وسيع غيرخطی نسبت به حالت، در سيستمهای غيرخطی و پيچيدهتر، وارد کردن قيد بر بهينهسازی غير خطی بسيار سادهتر از حالت خطی است؛ زيرا روشهای غيرخطی روش بهينهسازی تکراری دارند که اضافه کردن قيد به صورت جمله جريمه را ممکن میسازد.
در اين پروژه از آنجا که از نوع غيرخطی اين کنترلکننده استفاده شده، شناسايی و بهينهسازی هم بر اساس مدل غيرخطی انجام شده است؛ کنترل پيشبين غير خطی در فصل پنجم بررسی شده است.
در ادامه برای آشنايی با روش خطی به صورت مختصر روابط کنترل پيشبين مدل خطی بيان شده است.
اجزای الگوريتمهای کنترل پيش بين
بطور کلی، همه الگوريتمهای MPC اجزای مشترکی دارند، حال آنکه گزينه های متفاوتی را برای هر يک از اجزا، میتوان درنظر گرفت، که به الگوريتم هایي متفاوت، منتهی میشود.
اين اجزا عبارتند از:
- مدل پيشبين
- تابع هزينه
- بدست آوردن قانون کنترل
مدل پيشبين
مدل، پايه واساس MPC است؛ مدلی که خروجی سيستم مورد نظر را پيشبينی کند(مدل فرايند)؛ در مدلسازی خطی، مدل ممکن است يکی از مدلهای پاسخ ضربه، پاسخ پله، تابع تبديل يا مدل فضای حالت آن باشد؛ در مدلسازی غيرخطی نيز، میتواند يکی از مدلهای عصبی، فازی، ويا ترکيب اين دو و يا عاطفی استفاده شود که البته باعث پيچيده شدن مسئله بهينهسازی میگردد.
تابع هزينه
الگوريتمهای مختلف MPC از توابع هزینه ی متفاوت برای بدست آوردن قانون کنترل استفاده میکنند.
چنانچه اشاره شد هدف این است که خروجی آینده (y) با یک افق معلوم از یک سیگنال مرجع مشخصی متابعت نماید و همچنین هزینه ی کنترلی لازم برای این کار در حد معقولی باشد .
عبارت عمومی برای چنین تابع هدفی میتواند به صورت زیر باشد:
در بعضی روشها جملهی دوم عبارت فوق را در نظر نمیگیرد.
در اين رابطه تا افق پيشبينی خروجی و Nu افق کنترل میباشد.
لازم نیست Nu با افق ماکزیمم برابر باشد.N1 و N2 نیز مفهومی حسی دارد؛ زیرا حدود لحظات مطلوبی را که خروجی از مرجع پیروی میکند نشان میدهد.
بنابراین اگر مقدار N1بزرگ در نظر گرفته شود، در صورت وقوع خطا در لحظات اولیه، این مقدار اهمیتی نخواهد داشت.
اگر پروسه دارای زمان تاخیر d باشد، دلیلی برای کوچکتر گرفتن N1 از d وجود ندارد زیرا خروجی تا لحظه t+d شروع به بیشتر شدن نمیکند.
همچنین اگر سیستم غیر مینیمم فاز باشد این پارامتر اجازه میدهد که در لحظات اولیه پاسخ معکوس از تابع هزینه حذف شود.
ضرایب ![]() در رفتار آینده تاثیرگذار بوده و معمولاً دارای مقادیر ثابت و یا تابع نزولی نمایی میباشد، به عنوان مثال ممکن است وزن نمایی با توجه به افق به صورت زیر باشند :
در رفتار آینده تاثیرگذار بوده و معمولاً دارای مقادیر ثابت و یا تابع نزولی نمایی میباشد، به عنوان مثال ممکن است وزن نمایی با توجه به افق به صورت زیر باشند : ![]()
بدست آوردن قانون کنترل
به منظور بدست آوردن مقادیر u(t+k|t) لازم است که معادله ی مربوط به J را مینیمم کنیم .
برای این کار مقادیر خروجی های پیش بینی شده ![]() به عنوان تابعی از مقادیر گذشته ورودی و خروجی به همراه مقادیر آینده سیگنال کنترل با در نظر گرفتن مدل انتخابی و جایگزین کردن آن در تابع هزینه محاسبه میشود.
به عنوان تابعی از مقادیر گذشته ورودی و خروجی به همراه مقادیر آینده سیگنال کنترل با در نظر گرفتن مدل انتخابی و جایگزین کردن آن در تابع هزینه محاسبه میشود.
برخی از الگوريتمهای کنترل پيشبين مدل
همانطور که میدانيد خانواده وسيعی از کنترل کننده های پيشبين خطی وجود دارند و هر عضو از اين گروه با اجزای عمومی نظير مدل پيشبين، تابع هزينه و يک قانون کنترل تعريف میشوند.
که از جمله ی آنها میتوان به موارد زیر اشاره کرد:
- کنترلکننده ماتریسی دینامیکی (DMC)
- کنترل خود تنظیم پیش بین گسترش یافته (EPSAC)
- کنترل پیش بین تعمیم یافته (GPC)
- کنترل الگوریتمیک مدل (MAC)
- کنترل تابعی پیش بین (PFC)
- کنترل ماتریسی دینامیکی کنترل (QADMC)
- بهینهسازی حلقهی باز ترتیبی (SOLP)
- و غیره
عنوان کلی که برای همهی این کنترلکنندهها بکار میرود، کنترل پیش بین(MPC) یا بر اساس مدل (MBPC) میباشد.
برخی از اين الگوريتمها که به طور وسيعی در صنعت استفاده میشود، عبارت است از کنترل تابعی پيشبين، کنترل ماتريس ديناميکی و کنترل پيشبين تعميم يافته؛ از بين اين روشها، کنترل پيشبين تعميم يافته از مدل خطی تابع تبديل سيستم استفاده میکند، که در بين مدلهای خطی بيان شده، تابع تبديل سيستم به دليل تعداد پارامترهای کمتر و روش شناسايی مشخص، بيشتر از ساير روشها رواج دارد، لذا اين الگوريتم يکی از بهترين و عمومیترين الگوريتمهای کنترل پيشبين است که توسط کلارک پيشنهاد و به يکی از عمومیترين روش های کنترل پيشبين در صنعت و مجامع آکادميک تبديل شد.
اين روش بطور موفقيت آميزی در کاربردهای صنعتی پياده سازی و با عملکرد خوب و درجه مقاومت مناسبی همراه شد.
اين روش توانايی انجام دادن مسائل کنترلی برای محدوده وسيعی از فرآيندها با تعداد معقول متغيرهای طراحی و با توجه به اطلاعات گذشته و اهدف کنترلی موردنظر را دارد.
ايده اصلی در کنترل پيشبين تعميم يافته، محاسبه زنجيره سيگنال های کنترلی آينده، از طريق کمینه کردن يک تابع هزينه در طول افق پيشبين می باشد.
كنترل الگوريتميك مدل در اواخر دهه 70 ميلادي در همان زمان كه DMC توسط كاتلر مطرح شد، معرفي شده و در شركت آدرسا استفاده شده و روحاني بعداً در سال 1982 آنرا آناليز كرده است.
در اين روش از مدل پاسخ ضربه استفاده ميشود.
در كنترل تطبيقي افق گسترده که يكي ديگر از روشهاي كنترل پيشبين خطي ميباشد، خروجي هاي پيشبيني شده با استفاده از حل يك معادله ديوفانتين در نزديك ورودي مرجع قرار ميگيرند.
در اينجا تنها به روشهايی بطور مختصر اشاره شد که در صنعت کاربرد بيشتری داشتند؛ توضيحات بيشتر در اين زمينه، از توان اين پروژه خارج است.
روباتیک، علم مطالعه فن آوری مرتبط با طراحی ساخت و اصول کلی و کاربرد روباتهاست.
روباتیک علم و فن آوری ماشین های قابل برنامه ریزی، با کاربردهای عمومی می باشد.
برخلاف تصور افسانه ای عمومی از رباتها به عنوان ماشینهای سیار انسان نما که تقریباً قابلیت انجام هر کاری را دارند، بیشتر دستگاههای روباتیک در مکانهای ثابتی در کارخانه ها بسته شده اند و در فرایند ساخت با کمک کامپیوتر، اعمال قابلیت انعطاف، ولی محدودی را انجام می دهند چنین دستگاهی حداقل شامل یک کامپیوتر برای نظارت بر اعمال و عملکردهای و اسباب انجام دهنده عمل مورد نظر، می باشد.
علاوه براین، ممکن است حسگرها و تجهیزات جانبی یا ابزاری را که فرمان داشته باشد بعضی از رباتها، ماشینهای مکانیکی نسبتاً ساده ای هستند که کارهای اختصاصی مانند جوشکاری و یا رنگ افشانی را انجام می دهند.
که سایر سیستم های پیچیده تر که بطور همزمان چند ار انجام می دهند، از دستگاه های حسی، برای جمع آوری اطلاعات مورد نیاز برای کنترل کارشان نیاز دارند.
حسگرهای یک ربات ممکن است بازخورد حسی ارائه دهند، طوریکه بتوانند اجسام را برداشته و بدون آسیب زدن، در جای مناسب قرار دهند.
ربات دیگری ممکن است دارای نوعی دید باشد.،
که عیوب کالاهای ساخته شده را تشخیص دهد.
بعضی از رباتهای مورد استفاده در ساخت مدارهای الکترونیکی، پس از مکان یابی دیداری علامتهای تثبیت مکان بر روی برد، می توانند اجزا بسیار کوچک را در جای مناسب قرار دهند.
ساده ترین شکل رباهای سیار، برای رساندن نامه در ساختمانهای اداری یا جمع آوری و رساندن قطعات در ساخت، دنبال کردن مسیر یک کابل قرار گرفته در زیر خاک یا یک مسیر رنگ شده که هرگاه حسگرهایشان در مسیر، یا فردی را پیدا کنند متوقف می شوند.
رباتهای بسیار پیچیده تر رد محیط های نامعین تر مانند معادن استفاده می شود.
امروزه پیشرفت علوم و فناوریهای مربوط به صنعت رباتیک و استفاده روبه گسترش آنها در صنایع مختلف از جمله کارخانهها، صنایع نظامی، زمینه هوافضا و … موجب شده تا زمینه های تحقیقاتی فراوانی در این زمینه باز شده و ایدههای نو ظهور پیدا کنند.
در این راستا افزایش این نیازها سبب شده توجه بسیاری از پژوهشگران به این زمینه معطوف شود.
چنانچه مشاهده میشود، مهندسی رباتیک در حوزههای وسیعی از مهندسی برق و مهندسی مکانیک مورد بررسی قرار گرفته میشود و مقالات زیادی در این زمینه به چاپ میرسند.
در این میان یکی از بحثهایی که به بحثی داغ در میان محافل مختلف رباتیکی تبدیل شده است، کوچک کردن حجم ربات صرف نظر از پیچیدگی رفتاری آن است.
ایده کاهش حجم ربات در کنار حفظ ساختار عملکرد آن، از حشرات موجود در طبیعت بهره گرفته شده است.
در این زمینه سعی شده است از سیستم فیزیکی حشرات الگو برداری شود.
زیرا در بسیاری از کاربردها مثلا در زمینه هوافضا به علت اهمیت کاهش وزن، به دنبال کاهش حجم خواهیم بود.
در این میان استفاده از تکنولوژیهای قدیمی کارگشا نبوده زیرا بسیاری از اجزای رباتها مثلا چرخ دندهها و … را نمیتوان در حجمهای کوچک جای داد.
از سوی دیگر رفتار پیچیده این رباتها به حسگرها و محرکهای بسیار پیچیدهتری احتیاج دارد.
که این سرآغازی برای استفاده مواد هوشمند در صنایع رباتیکی است.
محرکهای مغناطیسی یک تکنولژی موثر در سیستمهای مکانیکی با دقت بالا لحاظ شده و کاربردهای گستردهای از آنها در صنعت دیده شده است.
یکی از کاربردهای گستردهای از این سیستمها در صنایع خودرو سازی دیده میشود.
در این صنایع از محرکهای مغناطیسی در کاربردهایی استفاده میشود که سیستم در یک ثانیه چندین بار تغییر وضعیت میدهد.
گذشته از کاربرد مفید این سیستمها، کنترل آنها در گروه سیستمهایی با کنترل سخت دسته بندی میشوند.
این سیستم از سه قسمت تشکیل شده است، یک بخش آن را سیستم مکانیکی تشکیل میدهد، بخش دیگر متشکل از سیمپیچ ها و در واقع سیستم مغناطیسی است.
در بخش دیگر سیستم الکتریکی وجود دارد که وظیفه کنترلی سیستم را برعهده دارد.
مدل سازی سیستم
در این پروژه مدل سیستم به صورت یک تابع تبدیل مرتبه اول و یک تاخیر تعریف شده است.
این مدل به صورت زیر نشان داده شده است.
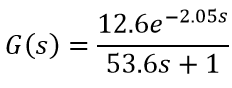
صرف نظر از مقدار تاخیر، ثابت زمانی سیستم برابر است با 53.6 ثانیه که با تقسیم این عدد به 10 میتوان تابع زمان نمونه برداری را محاسبه کرد.
اما مقدار زمان نمونه برداری در این مقاله برابر با 1.025 انتخاب شده است که ما برای نزدیکی شبیه سازی ها همین مقدار را به عنوان زمان نمونه برداری انتخاب می کنیم.
توجه داریم که در بسیاری از فرآیند های صنعتی تابع تبدیل را به صورت یک تاخیر و یک تابع تبدیل مرتبه اول درنظر میگیرند. در این حالت اگرچه خطا در کنترل بالا میرود ولی سادگی کار ارزش این هزینه را دارد.
با توجه به این که کنترل پبشبین وابسته به مدل است، لذا در این کنترل کننده در صورتی که خطای قابل توجهی میان مدل اصلی و مدل ریاضی وجود داشته باشد، کنترل کننده در عمل به سختی خروجی را ردیابی میکند.
در این پروژه کدهایی بر اساس الگوریتم نوشته شده است که پارامترهای کنترل پیش بین از جدول زیر که در مقاله موجود می باشد، اقتباس شده است.
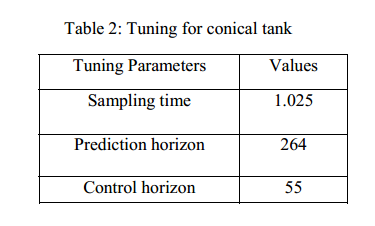
در نهایت با استفاده از این پارامترها نتایج شبیه سازی به صورت زیر می باشند.
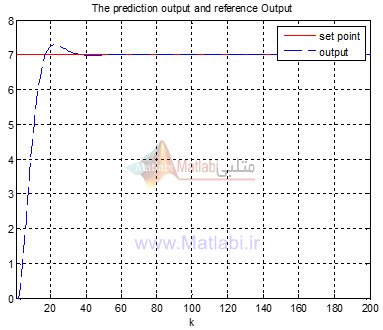
نتایج ردیابی برای مرجع 7
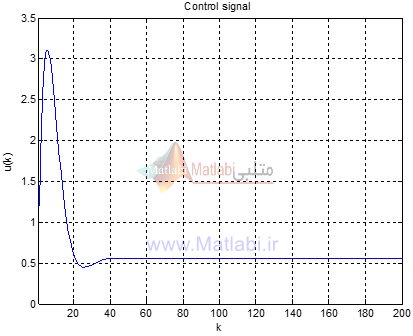
سیگنال کنترلی سیستم برای مرجع 7
با توجه به شکل های فوق مشاهده می شود که سیگنال کنترل قابل قبول بوده و نتایج ردیابی به خوبی قابل قبول می باشند.
مقادیر ردیابی برای سیگنال مرجع 23 به صورت شکل زیر می باشند.
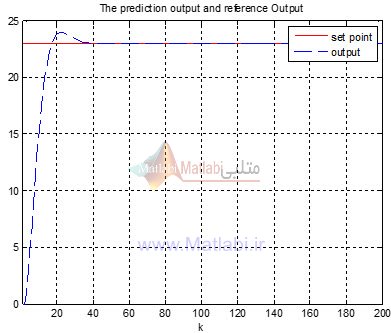
نتایج ردیابی برای سیگنال مرجع 23
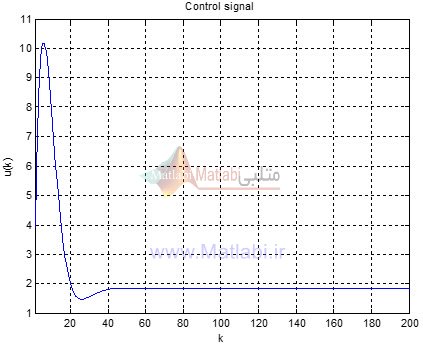
سیگنال کنترلی سیستم برای مرجع 23
کلید واژه : کنترل پيش بين, حذف اثر اغتشاش, کاهش حساسيت, پايداری , پروژه متلب, پروژه matlab , شبیه سازی با متلب
Model, PI Controller, Tuning, Model Predictive Controller
شبیه سازی
CONTROLLER DESIGN BASED ON MODEL PREDICTIVE CONTROL FOR A NONLINEAR PROCESS
به تعداد محدودی قابل فروش می باشد.
سفارش انجام پروژه مشابه
درصورتیکه این محصول دقیقا مطابق خواسته شما نمی باشد،.
با کلیک بر روی کلید زیر پروژه دلخواه خود را سفارش دهید.






دیدگاهها
هیچ دیدگاهی برای این محصول نوشته نشده است.