توضیحات
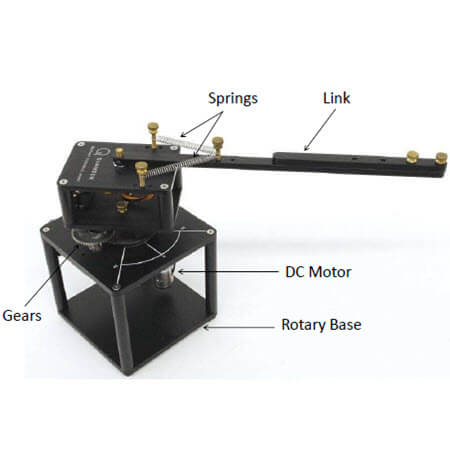
Control of Flexible Joint Robotic Manipulator: Design and Prototyping
شبیه سازی در محیط سیمولینک متلب انجام شده است.
دارای گزارش ورد 7 صفحه ای است.
دارای ویدیو 2 دقیقه ای است.
توضیحات پروژه
شبیه سازی در محیط متلب 2018a و 2018b تهیه شده است و با متلب 2014a نیز تست و اجرا شده است. و گزارش شبیه سازی شامل توضیحات در مورد سیمولینکها و نتایج شبیه سازی با متلب هست.
با اجرای شبیه سازی نتایج زیر حاصل میشود. ملاحظه میگردد که همچون مقاله عمل تعقیب سیگنال مرجع به خوبی انجام شده است (حتی بهتر از مقاله). مقادیر مربوط به نمودار آبی رنگ نیز در حدود مقاله است. تفاوتی که وجود دارد نیز به دلیل مشخص نبودن مقادیر عددی پارامترها و استفاده از مقادیر تخمینی است.
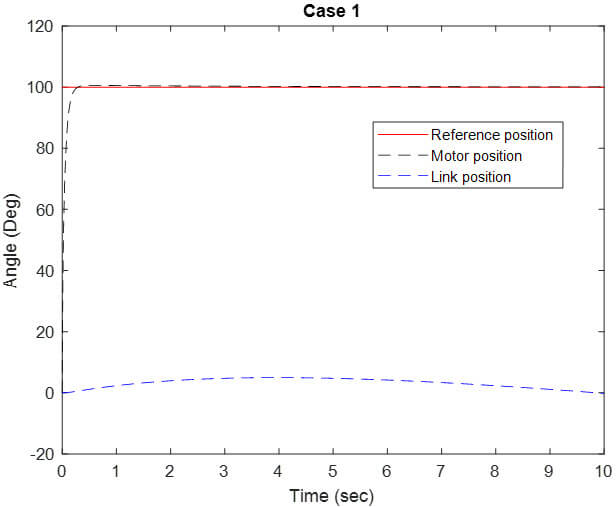
Simulated trajectory tracking of flexible robotic arm using step input
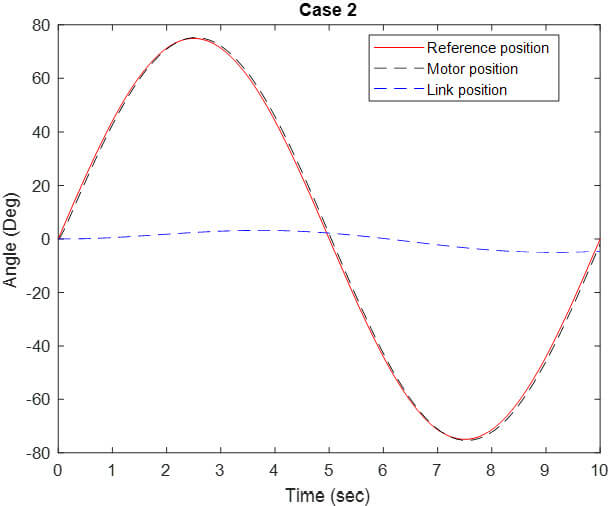
Simulated trajectory tracking of flexible robotic arm using sinusoidal input
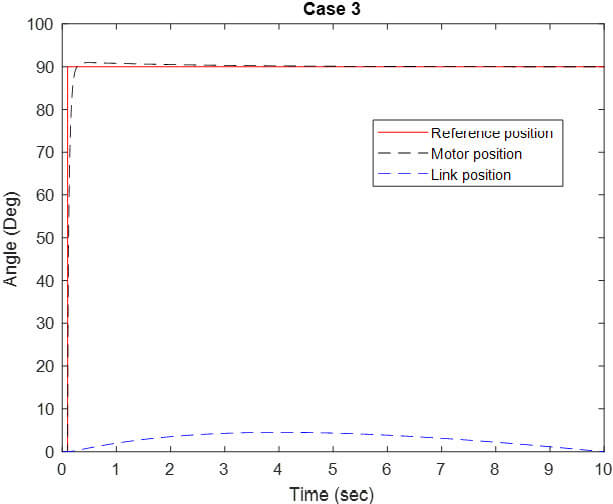
Experimental step trajectory tracking of flexible robotic arm
کلیدواژه:
Robotics, Flexible robotic arm, Control techniques, Proportional Integral Derivative, Control
شبیه سازی Control of Flexible Joint Robotic Manipulator: Design and Prototyping
طبق توضیحات فوق توسط کارشناسان سایت متلبی تهیه شده است و به تعداد محدودی قابل فروش می باشد.
سفارش انجام پروژه مشابه
درصورتیکه این محصول دقیقا مطابق خواسته شما نمی باشد،.
با کلیک بر روی کلید زیر پروژه دلخواه خود را سفارش دهید.





دیدگاهها
هیچ دیدگاهی برای این محصول نوشته نشده است.