توضیحات
Control of a Nonlinear Coupled Three Tank System using Feedback Linearization
شبیه سازی در محیط ام فایل متلب انجام شده است.
دارای گزارش ورد 5 صفحه ای است.
در این پروژه علاوه بر شبیه سازی مقاله , یک روش کنترل مدلغزشی نیز بکار گرفته شده و با آن مقایسه شده است.
روابط کنترل مدلغزشی در گزارش این پروژه آمده است.
توضیحات پروژه
شبیه سازی از 3 کد تشکیل شده است:
فایل main: برنامه با این فایل اجرا می شود.
فایل backSteppingController که شامل معادلات کنترلر back stepping است و تمام معادلات آن طبق مقاله نوشته شده است. هم چنین در هر خط از این کد مشخص شده است که مربوط به کدام نمودار مقاله است.
فایل slidingModeController که شامل معادلات کنترلر مود لغزشی است و نحوه طراحی آن در این جا بیان می شود.
از آن جایی که در این روش نیاز به یک مسیر مرجع است، خروجی کنترلر مود لغزشی را معادل مسیر مرجع برای مود لغزشی فرض می کنیم تا هر دو سیستم یک مسیر را بپیمایند و بتوانیم دو روش را مقایسه نماییم.
نتایج شبیه سازی با متلب
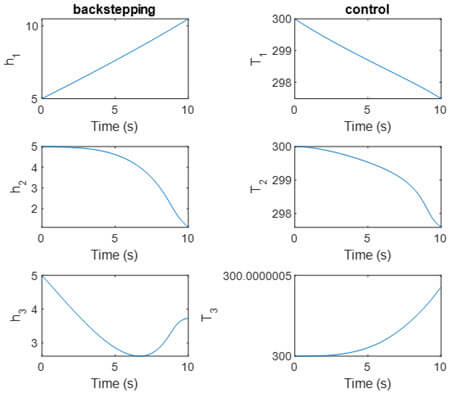
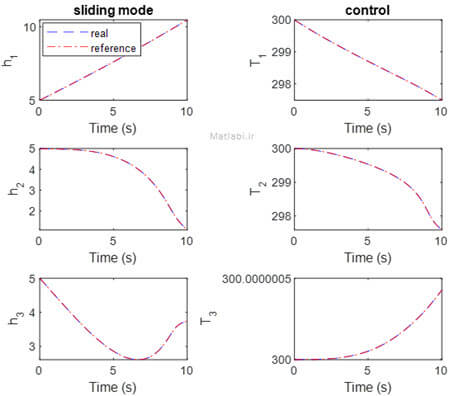
در ابتدا تغییرات متغیرهای حالت نمایش داده می شود. ملاحظه می شود که هر دو روش یک مسیر را طی کرده اند و کنترلر مود لغزشی به خوبی توانسته است مسیر مطلوب را تعقیب نماید:
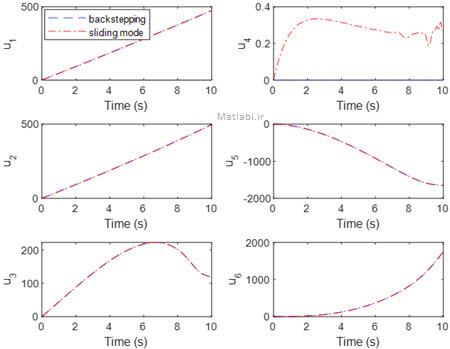
حال تغییرات ورودی کنترلی را بررسی می نماییم. مشاهده می شود که هر دو سیستم دارای تغییرات ورودی کنترلی نزدیک به هم هستند و بنابراین عملکردشان برای این مساله تقریبا یکی است:
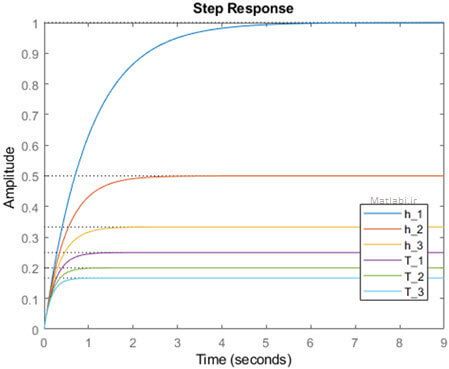
در نهایت تنها نمودار مربوط به مقاله را رسم می نماییم. این نمودار در خطوط 60 تا انتهای کد main رسم شده است. توابع تبدیل طبق معادله 63 در این خطوط نوشته شده اند. ملاحظه می شود که نمودار دقیقا مشابه مقاله است.
کلیدواژه:
Multi-Input-Multi-Output (MIMO) system, Coupled Three-Tank System (CTTS), Feedback Linearization (FBL), Programmable Logic Control (PLC)
شبیه سازی
Control of a Nonlinear Coupled Three Tank System using Feedback Linearization
طبق توضیحات فوق توسط کارشناسان سایت متلبی تهیه شده است و به تعداد محدودی قابل فروش می باشد.
سفارش انجام پروژه مشابه
درصورتیکه این محصول دقیقا مطابق خواسته شما نمی باشد،.
با کلیک بر روی کلید زیر پروژه دلخواه خود را سفارش دهید.






دیدگاهها
هیچ دیدگاهی برای این محصول نوشته نشده است.