توضیحات
Control and Navigation Framework for Quadrotor Helicopters
ساختار هدایت و کنترل برای هلیکوپترهای چهار روتوره کنترلر غیر خطی
چکیده
این مقاله پیشرفت و توسعه یک ساختار شبیه سازی شده چهار روتورِ غیرخطی را به همراه یک کنترلر غیر خطی ارائه می کند.
مشکلات پایداری و هدایت چهار روتور توسط معماری حلقه های کنترل تو در تو حل می شود.
یک کنترلر غیر خطیِ پسگام (backstepping )برای پایداری حلقه داخلی اجرا می شود.
این(کنترلر)وضعیت مرجع ،ارتفاع و مسیر حرکت هواپیما را بطور مجانبی ردیابی می کند.
کنترلر حلقه خارجی مسیرهای مرجع را برای کنترل حلقه داخلی ایجاد می کند تا بدین وسیله به ایستگاههای هوائی مطلوب برسد.
برای تضمین محدوده مسیرهای مرجع یک کنترلر pd با عملکرد در ناحیه اشباع برای حلقه خارجی بکار می رود.
به علت پیچیدگی موجود در آزمایش و توسعه کنترلر،یک ساختار شبیه سازی ایجاد شد.
این ساختار بر پایه شبیه سازی رباتیک بدنهِ سه بعدی و برنامه دینامیکهای موتور(ODE) می باشد.
:Open Dynamics Engine(ODE) این برنامه بکار میرود برای شبیه سازی تعاملات پویایِ بین اجسام در فضا؛مثلا سیلندر با نیمکره دربسته در محیط و…
این ساختارمی تواند توسعه و درستی کنترلرها را خیلی آسانتر کند.
این ساختار منتشر شده است و در بدنه شبیه ساز چهار روتور موجود است.
گزارش شبیه سازی
كار اصلي مقاله ارائه شده شده طراحي شبيه ساز ربات كوآدروتور در نرم افزار Gazebo ميباشد.
متأسفانه در شبيه سازيهاي ارائه شده مقاله هيچ اطلاعات عددي مربوط به ديناميك و سينماتيك ربات ارائه نشده است و شبيه سازيهاي خود را بر مبناي طرح ارائه شده در نرم افزار مذكور انجام داده اند.
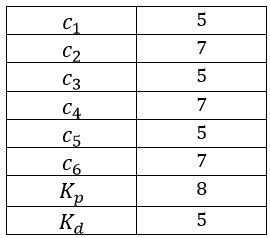
از اين رو، براي پياده كردن طرح كنترلي اين مقاله، مقادير مربوط به مدل ربات از اطلاعات ارائه شده در مراجع ديگر استفاده شده است كه به شرح زير ميباشد:

همچنين ضرايب مربوط به كنترل كننده پسگام براي كنترل جهت گيري roll، pitch و yaw و كنترل كننده PD براي كنترل موقعيت طبق جدول زير انتخابب شده است:
شبيه سازيها با استفاده از محيط Simulink صورت گرفته است.
كه در شكل زير بلوك دياگرام مربوط به كنترل جهتگيري و همچنين ارتفاع ربات نشان داده شده است
…
در اين شكل، بلوكهاي مربوط به مدل كوآدروتور، حلقه كنترلي داخلي و حلقه كنترلي خارجي كاملاً مشخص ميباشد.
…
حلقه خارجي از كنترل كننده PD بهره ميبرد و براي حلقه داخلي از كنترل كننده پسگام استفاده شده است.
توجه شود كه به هنگام اجراي اين برنامه مقادير مربوط به مدل ربات در مسير زير تعريف شده است كه ميتوان آنها را تغيير داد
File>>Model properties>>Callcacks>>InitFnc
پس از اجراي اين برنامه، نمايش نتايج را ميتوان با استفاده از mfile زير ملاحظه كرد
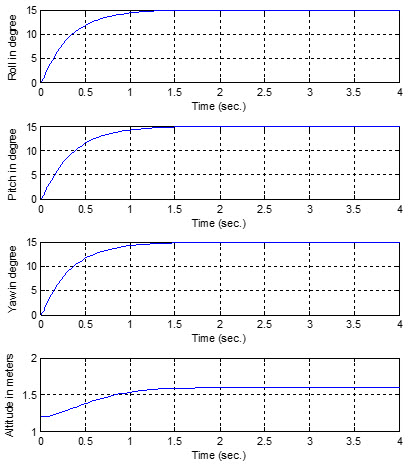
quadrotor_backstep_attitude.m
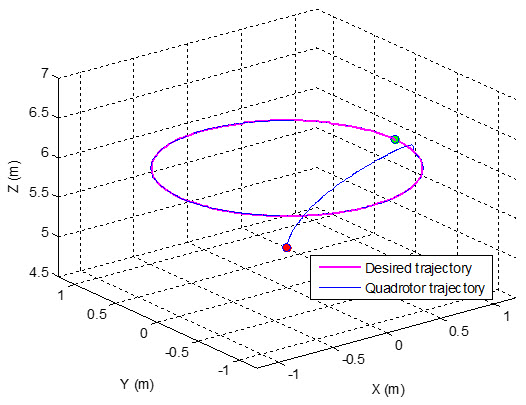
برنامه بعدي مربوط به رديابي و كنترل موقعيت ميباشد كه يك مسير دايروي براي ربات درنظر گرفته شده است. بلوك دياگرام Simulink اين برنامه به صورت زير ميباشد
پس از اجراي اين برنامه، نمايش نتايج را ميتوان با استفاده از mfile زير ملاحظه كرد
quadrotor_backstep_tracking.m
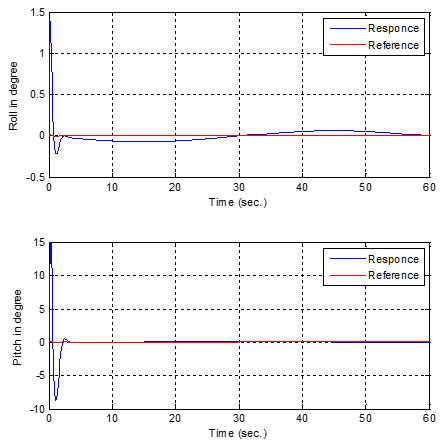
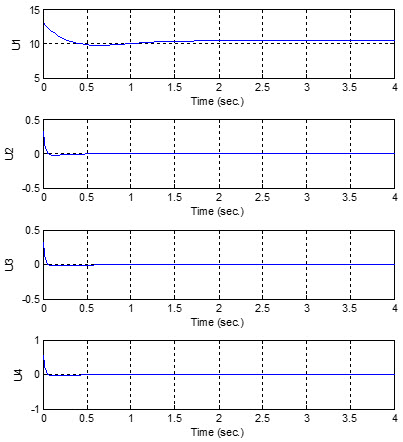
به طور مشابه ميتوان سيگنالهاي دلخواه ديگر سيستم از جمله سيگنالهاي كنترلي را نمايش داد.
کلید واژه ها :
چهارروتور . کنترل غیرخطی . پسگام(backstepping ). هدایت . ساختار شبیه سازی . Gazebo . دینامیکهای موتور(ODE)
, پروژه متلب, پروژه matlab , شبیه سازی با متلب
Quadrotor, Nonlinear control, Backstepping Navigation, Simulation, framework, Gazebo, Open dynamics engine
شبیه سازی
Stable optimal control applied to a cylindrical robotic arm
به تعداد محدودی قابل فروش می باشد.
سفارش انجام پروژه مشابه
درصورتیکه این محصول دقیقا مطابق خواسته شما نمی باشد،.
با کلیک بر روی کلید زیر پروژه دلخواه خود را سفارش دهید.





دیدگاهها
هیچ دیدگاهی برای این محصول نوشته نشده است.