توضیحات
کنترل سرعت موتورهای DC مورد استفاده در ربات های متحرک دو چرخ
عنوان اصلی مقاله:
Comparison of various controller design for the speed control of DC motors used in two wheeled mobile robots
شبیه سازی در محیط سیمولینک متلب انجام شده است. (با متلب2018b شبیه سازی انجام شده) با متلب 2023 نیز تست و اجرا شده است.
دارای گزارش ورد 10 صفحه ای می باشد.
توضیحات پروژه کنترل سرعت موتورهای dc
در این پروژه نتایج شکل های 3 تا 7 مقاله بدست آمده و از روش کنترل فازی-PID نیز برای کنترل سرعت موتورهای جریان مستقیم استفاده شده است. شبیه سازی شامل سه فایل است: 1- ام فایل اصلی( که برنامه با آن اجرا می شود) 2- فایل سیمولینک 3- فایل فازی
بخشی از گزارش پروژه:
خطوط 20 تا 22: رسم شکل 3 مقاله.
خطوط 24 تا 26: رسم شکل 4 مقاله (با دستور feedback سیستم حلقه بسته شده است).
خطوط 28 تا 32: رسم شکل 5 مقاله. در خطوط 29 و 30 تابع کنترلر P نوشته شده است.
خطوط 34 تا 39: رسم شکل 6 مقاله (تابع کنترلر PI در خط 37 نوشته شده است).
خطوط 41 تا 47: رسم شکل 7 مقاله (تابع کنترلر PID در خط 45 نوشته شده است).
خط 50: فراخوانی مدل سیمولینک مربوط به کنترلر فازی PID.
خطوط 52 تا انتها: رسم نمودار مربوط به کنترلر فازی PID.
توجه: (شکل های 8 و 9 به دلیل کمبود اطلاعات قابل رسم نیستند و رسم نشده اند)
هدف اصلی از این پروژه پیاده سازی کنترلر فازی PID برای این سیستم بوده است.
در زیر نتایج مربوط به شبیه سازی با متلب را مشاهده می نمایید:
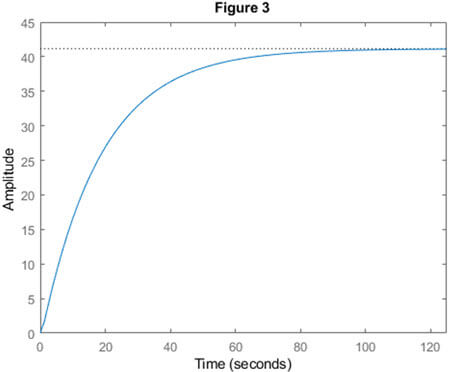
fig3. The step response of open loop dc motor
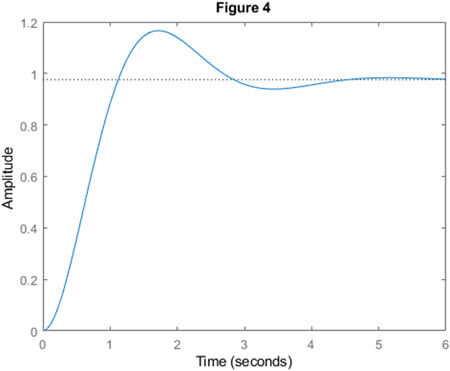
fig4. The step response of close loop dc motor
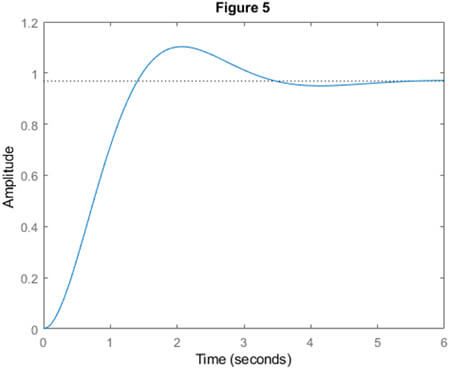
fig5. step response under P controller
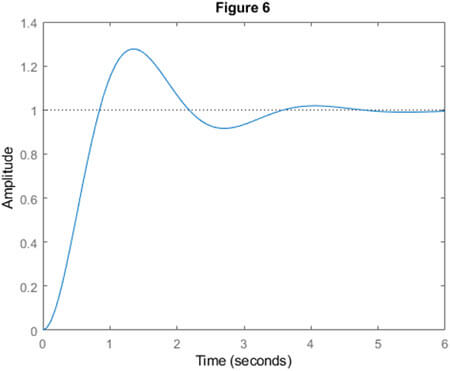
fig6. step response under PI controller
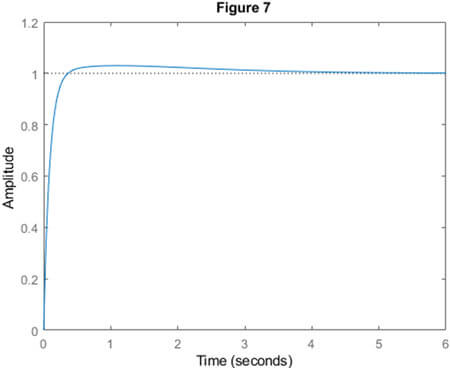
fig7. step response under PID controller
همانطور که مشاهده میشود نتایج منطبق با نتایج مقاله است.
در زیر به کنترلر Fuzzy-PID می پردازیم
طبق شکل زیر، سیستم فازی شامل دو ورودی خطا و مشتق خطا و سه خروجی ضرایب Kp و Ki و Kd مربوط به کنترلر است:
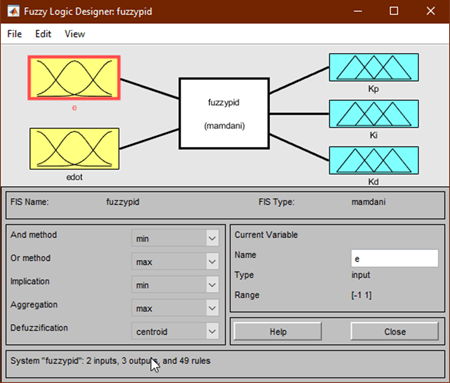
با کلیک بر روی هر یک از پنجره های زرد و آبی می توانیم توابع عضویت را مشاهده کنیم. هر ورودی شامل 7 تابع عضویت و هر خروجی شامل 2 تابع عضویت می باشند. هم چنین 49 قانون فازی برای این پروژه طراحی شده است.
ملاحظه می گردد که نتیجه شبیه سازی با کنترلر فازی-PID نسبت به تمام کنترلرهای مقاله نتیجه بهتری ظاهر شده است (حتی نسبت به شکل 9 مقاله) و خروجی خیلی سریع (کم تر از 1 ثانیه) و بدون نوسان به مقدار مطلوب همگرا شده است:
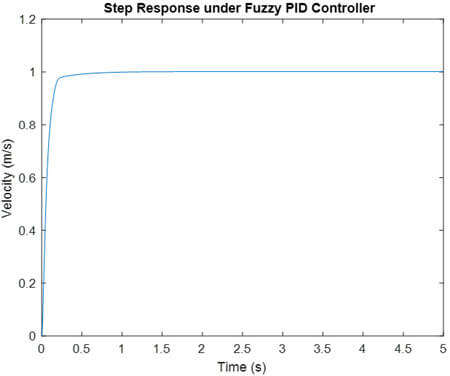
Step response of system under Fuzzy-PID controller
شاید به موارد زیر نیز علاقه مند باشید:
- طراحی و شبیه سازی کنترل کننده فازی برای سیستم ترمز ضد قفل فازی
- کنترل انحراف خودرو با فیدبک خروجی Hبینهایت مقاوم با استفاده از فرمان چرخ جلو فعال
- شبیه سازی تغذیه سیکلو کانورتر موتور القایی انشقاق فاز
- کنترل فازی یک ربات متحرك چرخدار برای دنبال کردن یک مسیر از پیش تعیین شده با متلب
- کنترل سرعت موتورهای القایی با استفاده از کنترل مد لغزشی دینامیکی فازی عصبی
کلیدواژه:
Kinematic model, PID , Speed control DC motor, Two wheeled mobile robot, fuzzy-pid
کنترل سرعت موتورهای DC مورد استفاده در ربات های متحرک دو چرخ با متلب
طبق توضیحات فوق توسط کارشناسان سایت متلبی تهیه شده است و به تعداد محدودی قابل فروش می باشد.
سفارش انجام پروژه مشابه
درصورتیکه این محصول دقیقا مطابق خواسته شما نمی باشد،.
با کلیک بر روی کلید زیر پروژه دلخواه خود را سفارش دهید.






دیدگاهها
هیچ دیدگاهی برای این محصول نوشته نشده است.