توضیحات
کنترل مودلغزشی ترکیبی برای میکروگریدهای DC رابط IFDBC با بارهای الکترونیکی قدرت
عنوان اصلی مقاله:
Combined Sliding-Mode Control for the IFDBC Interfaced DC Microgrids With Power Electronic Loads
شبیه سازی در محیط سیمولینک و ام فایل متلب 2018 انجام شده است.
دارای گزارش 11 صفحه ای در قالب ورد است.
توضیحات پروژه کنترل مودلغزشی ترکیبی
این مقاله در مورد کنترل مودلغزشی برای تبدیل کننده های دو بوستر شناور میانبری (IFDBC) است که به میکروگریدهای مستقل از شبکه متصل می شوند.
شبیه سازی برای شکل های 5 تا 15 مقاله انجام شده است. شکل های 17 تا 20 مربوط به نتایج عملی است که ترسیم نشده اند. شبیه سازی مربوط به هر عکس در پوشه ای با شماره عکس مربوطه قرار داده شده است (مثلا شبیه سازی شکل 5(a) در پوشه fig_5_a).
شبیه سازی ها تمام کدنویسی متلب است فقط به دلیل این که باید از بلوک های مشتق گیر استفاده می شد از MATLAB function در سیمولینک استفاده شده است.
در گزارش ورد در مورد شبیه سازی توضیح داده شده است.
توجه: نمودار قرمز رنگ شکل 8 و آبی رنگ شکل 15 مربوط به روشهای خارج از روش مقاله هستند و فقط برای مقایسه می باشند و بنابراین رسم نشده اند ولی سایر نمودارها تا قبل از بخش عملی مقاله، کامل رسم گردیده اند.
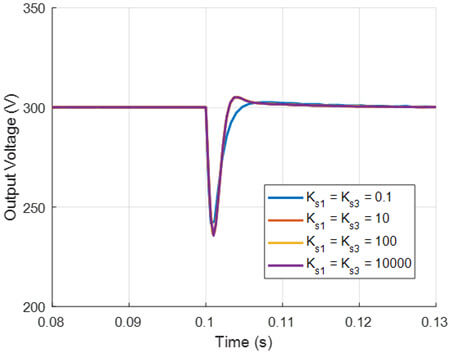
Fig. 5. Dynamic responses of the DC bus voltage: (a) with various Ks1 and Ks3
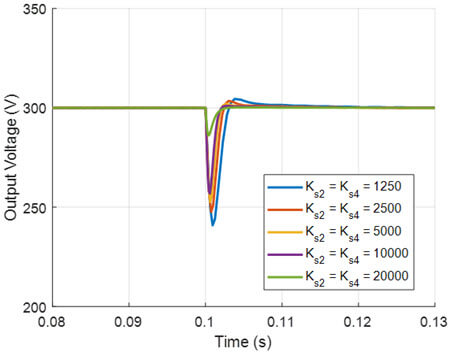
Fig. 5. Dynamic responses of the DC bus voltage: (b) with various Ks2 and Ks4
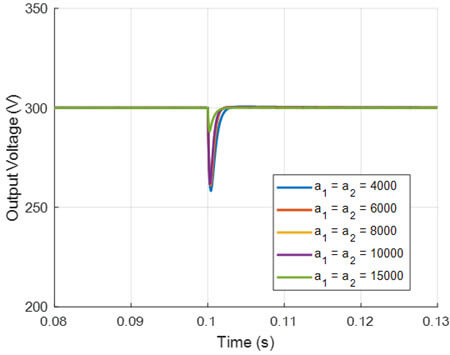
Fig. 5. Dynamic responses of the DC bus voltage: (c) with various a1 and a2
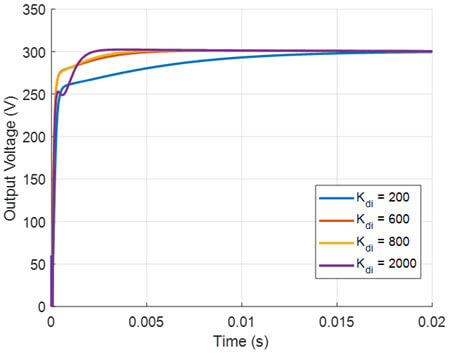
Fig. 6. Start-up responses of the DC bus voltage with various Kdi
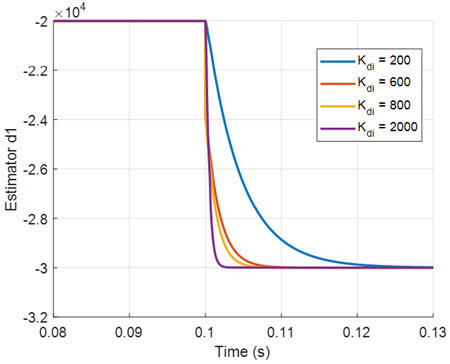
Fig. 7. Dynamics responses of the estimator d^1 with various Kdi

Fig. 8. DC bus voltage responses obtained using the proposed NDO based SMC (blue) and the traditional SMC (red)
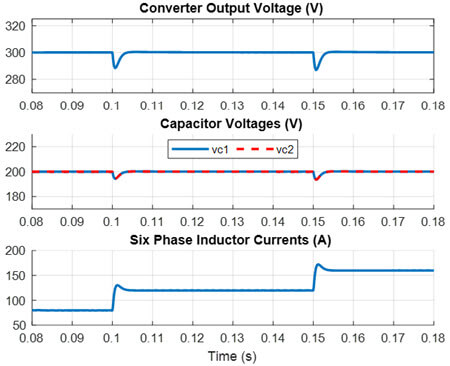
Fig. 9. Simulation system transient responses in the presence of CPL changes (Top: output voltage; Middle: module capacitor voltage; Bottom: current of six phases)
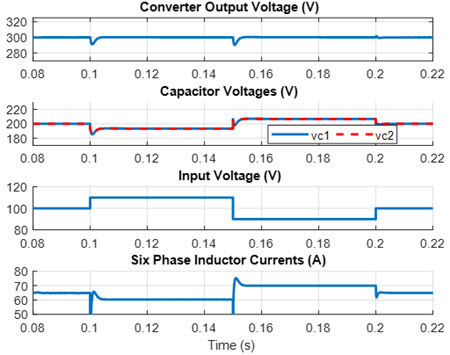
Fig. 10. Simulation system transient responses in the presences of input
voltage changes (Top: output voltage; Second: module capacitor voltage; Third: input voltage; Bottom: current of six phases)
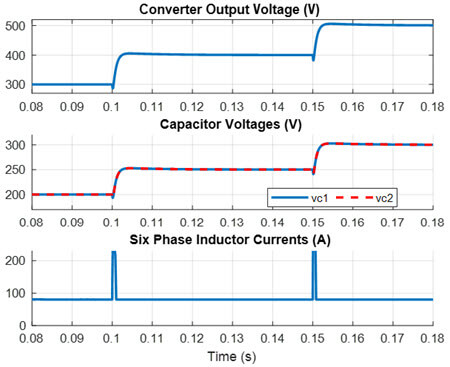
Fig. 11. Simulation system transient responses in the presences of voltage reference changes (Top: output voltage; Second: module capacitor voltage; Third: input voltage; Bottom: current of six phases)
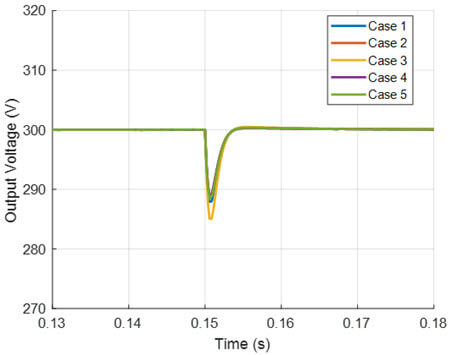
Fig. 12. DC bus voltage dynamic response with the circuit parameter
uncertainties

Fig. 15. Transient responses in the presence of CPL changes of the system regulated by proposed controller (red) and PI controller (dotted blue)
شکل های 13 و 14: این دو شکل تنها شبیه سازی هایی هستند که نیاز به محیط سیمولینک نیاز ندارند. در فایل main مربوطه دو تابع تبدیل که مربوط به روابط 58 و 59 است (در مقاله به اشتباه 48 و 49 نوشته شده است)، نوشته شده اند و سپس با دستور bode نمودار رسم می گردد ولی متاسفانه نمودار شباهتی به مقاله ندارد و از آن جا که نمودار دقیقا طبق توضیحات مقاله رسم شده اند، به نظر می آید، مقاله همه چیز را در این مورد توضیح نداده باشد.
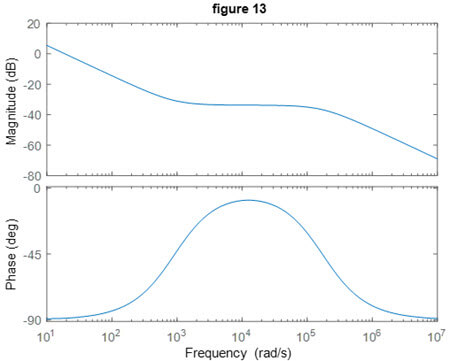
Fig. 13. Bode plot of the inner current loop gain using PI controller given
in (58)

Fig. 14. Bode plot of the inner current loop gain using PI controller given
in (59)
شاید به موارد زیر نیز علاقه مند باشید:
- راهکار ارائه پیشنهاد تطبیقی بر اساس یادگیری-Q در حراجهای ترکیبی
- طراحی بهینه میکروگریدهای هوشمند شامل پاسخگویی بار و منابع انرژی تجدید پذیر متناوب
- پاسخ مبتنی بر ILMI برای تنظیم مقاوم کنترل کننده های PI و PID
- کنترل مود لغزشی مرتبه کسری برای کنترل وضعیت ماهوارهای اسمی و کم کار
کلیدواژه:
Interleave boost converter, sliding-mode control, constant power load, nonlinear disturbances
مبدل تقویت کننده میان لایه, کنترل حالت لغزشی, بار قدرت ثابت, اختلالات غیر خطی
کنترل مودلغزشی ترکیبی برای میکروگریدهای DC رابط IFDBC با بارهای الکترونیکی قدرت با متلب
طبق توضیحات فوق توسط کارشناسان سایت متلبی تهیه شده است و به تعداد محدودی قابل فروش می باشد.
سفارش انجام پروژه مشابه
درصورتیکه این محصول دقیقا مطابق خواسته شما نمی باشد،.
با کلیک بر روی کلید زیر پروژه دلخواه خود را سفارش دهید.






دیدگاهها
هیچ دیدگاهی برای این محصول نوشته نشده است.