توضیحات
Collision-Free Trajectory Planning for a 3-DOF Robot with a Passive Joint
ترجمه فارسی موضوع مقاله: برنامه ریزی مسیر برخورد برای ربات 3 درجه آزادی با یک مشترک منفعل
كنترل جهت كوادروتور با استفاده خطی سازی فيدبک
طراحي يك كنترلر غيرخطي به روش خطيسازي فيدبك (Feedback Linearization) براي سيستم quadrotor ارائه شده است. در حقيقت با بهرهگيري از روش خطيسازي ورودي-خروجي (I.O.L)، كنترلر مناسبي براي سيستم مذكور طراحي شده است.
نتایج بدست آمده از شبیه سازی با متلب:
U1 =
-2.7831e-05
U =
1.0e-04 *
-0.2783 0.2225 -0.4991
angle2dot =
1.0e-03 *
-0.3505 0.2829 -0.3515
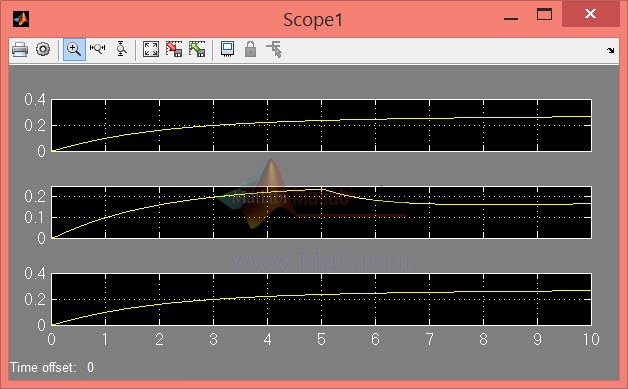
با مشاهده نمودارهاي مربوطه مشخص ميشود، همانطوركه در مقدمه نيز اشاره شد، روش كنترل تطبيقي يكي از روشهاي خوب و موفق در زمينه كنترل رباتيك ميباشد. بديهي است كه سيستم قابل تنظيم ما توانسته به خوبي ماموريت خود را انجام داده و رفتار سيستم ربات را به رفتار مدل مرجع نزديك كند. در ضمن مشاهده ميشود كه پاسخ سيستم به ورودي سينوسي به مراتب بهتر از ورودي پله ميباشد.
دارای گزارش 13 صفحه ای در قالب ورد است.
کلید واژه : کنترل فیدبک، خطيسازي فيدبك
underactuated manipulator, trajectory planning, locally controllable nonholonomic system, passive joint, decoupling motions, Feedback Linearization
شبیه سازی مقاله Collision-Free Trajectory Planning for a 3-DOF Robot with a Passive Joint
به تعداد محدودی قابل فروش می باشد.
سفارش انجام پروژه مشابه
درصورتیکه این محصول دقیقا مطابق خواسته شما نمی باشد،. با کلیک بر روی کلید زیر پروژه دلخواه خود را سفارش دهید.






دیدگاهها
هیچ دیدگاهی برای این محصول نوشته نشده است.