توضیحات
Analysis of the Fuzzy Controllability Property and Stabilization for a Class of T–S Fuzzy Models
آنالیز ویژگی کنترل پذیری فازی و تثبیت کننده برای یک کلاس از مدل های فازی T-S
شبیه سازی در محیط ام فایل متلب انجام شده است.
دارای گزارش ورد 10 صفحه ای است.
توضیحات پروژه
در این پروژه به شبیه سازی 4 مثال موجود در مقاله پرداخته شده است.
شبیه سازی هر پروژه در پوشه example 1 تا example 4 داخل پوشه simulation قرار گرفته اند تا هر کدام به راحتی قابل تشخیص و تفکیک باشند. پوشه example 4 مربوط به مثال بازوی ربات غیرخطی است.
نتایج شبیه سازی با متلب
نتایج مربوط به مثال اول مقاله:

حال ماتریس کنترل پذیری را طبق رابطه 16 مقاله تولید می نماییم . دترمینان این ماتریس، در خط 28 فایل main محاسبه شده است که نتیجه آن به صورت زیر می باشد:
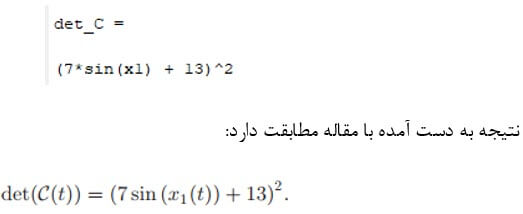
سپس ریشه های این دترمینان به دست می آید که مجددا ملاحظه می شود با مقادیر مقاله مطابقت دارد:
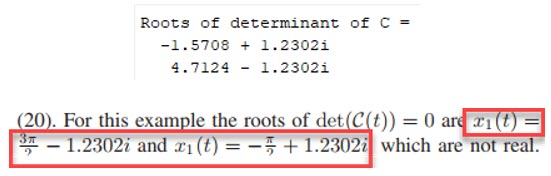
حال طبق توضیحات مقاله، به دلیل کنترل پذیر بودن ماتریس C، مقادیر ویژه فازی را در هر کجا می توان قرار داد که طبق پیشنهاد مقاله دو ریشه -5 و -6 برای این کار انتخاب می شوند.
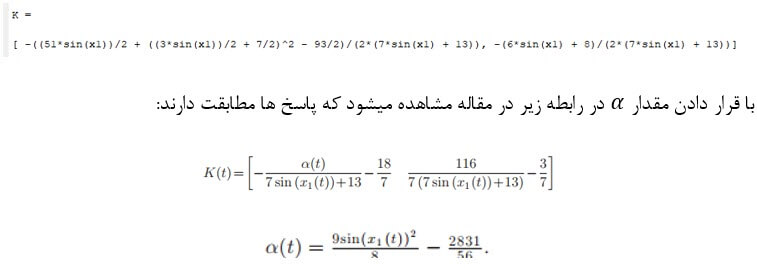
اکنون ماتریس K(t) طبق رابطه 18 مقاله (آکرومن) تشکیل می گردد:
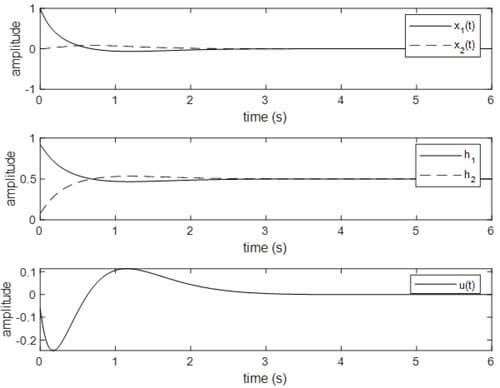
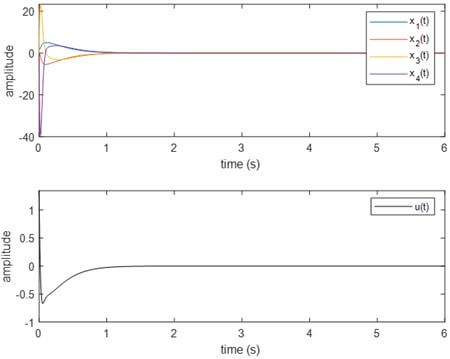
States, membership functions, and control signal for the T–S fuzzy
model
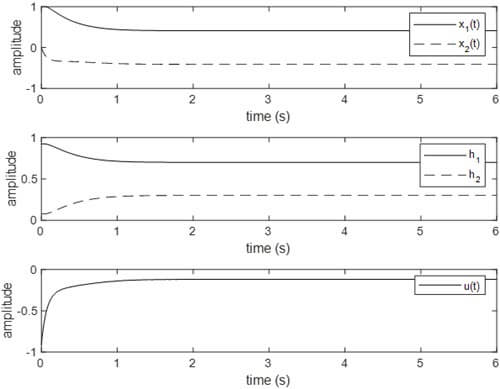
برای مثال 2 مقاله نیز دترمینان و ریشه های آن دقیقا مطابق با مقاله بدست آمده.
با مشاهده این ریشه ها (طبق توضیحات مقاله) هر دو زیر مجموعه فازی کنترل پذیر هستند ولی این باعث کنترل پذیر شدن سیستم کلی نگردیده است. نمودار زیر نتایج شبیه سازی این مثال است. این نمودارها در مقاله ارائه نشده است ولی به جهت درک بهتر موضوع در این جا آورده می شوند:
برای مثال سوم مقاله نیز دترمینان و ریشه آن محاسبه شده و نتایج دقیقا مطابق مقاله بدست آمده که در گزارش این پروژه موجود است.
نتیجه اعمال کنترلر به سیستم در ادامه آورده شده است (این نمودار در مقاله نیست اما ما رسم کرده ایم.)
برای مثال چهارم مقاله ، بازوی یک ربات غیر خطی است. روابط این ربات در مقاله داده شده است. نویسندگان به خطی سازی این ربات پرداخته و سه زیر سیستم را پس از خطی سازی به دست آورده اند.
نمودار تابع عضویت را در زیر مشاهده مینمایید که دقیقا همانند مقاله بدست آمده است:
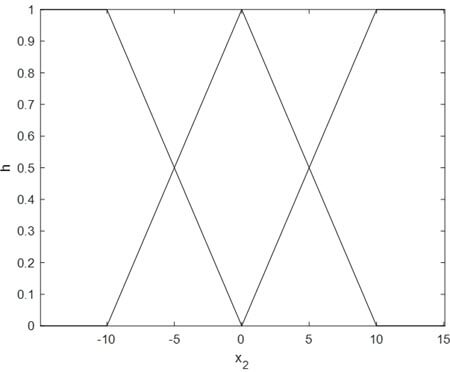
Membership functions for the pendubot
در اینجا توضیحات رسیدن به نمودار زیر را نیاورده ایم و با خرید این پروژه میتوانید به فایل شبیه سازی و گزارش آن دسترسی پیدا کنید.
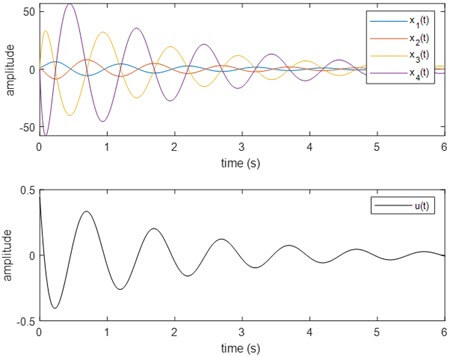
States and control signal for the nonlinear model of the pendubot when
the controller is obtained from fuzzy Ackermann’s formula 3.2
ملاحظه میشود مجددا نتایج نزدیک به مقاله به دست آمده است.
در انتها به روش دیگری که در صفحه 9 مقاله ارائه شده است، سیستم را از طریق PDC (طبق توضیحات مقاله) پایدار می نماییم. روابط در فایل systemEquations1 آورده شده اند.
States and control signal for the nonlinear model of the pendubot when
the controller is obtained from the PDC approach
کلیدواژه:
Fuzzy Ackermann’s formula, fuzzy controllability, fuzzy stability, Takagi–Sugeno (T–S) fuzzy models
شبیه سازی
Analysis of the Fuzzy Controllability Property and Stabilization for a Class of T–S Fuzzy Models
طبق توضیحات فوق توسط کارشناسان سایت متلبی تهیه شده است و به تعداد محدودی قابل فروش می باشد.
سفارش انجام پروژه مشابه
درصورتیکه این محصول دقیقا مطابق خواسته شما نمی باشد،.
با کلیک بر روی کلید زیر پروژه دلخواه خود را سفارش دهید.






دیدگاهها
هیچ دیدگاهی برای این محصول نوشته نشده است.