توضیحات
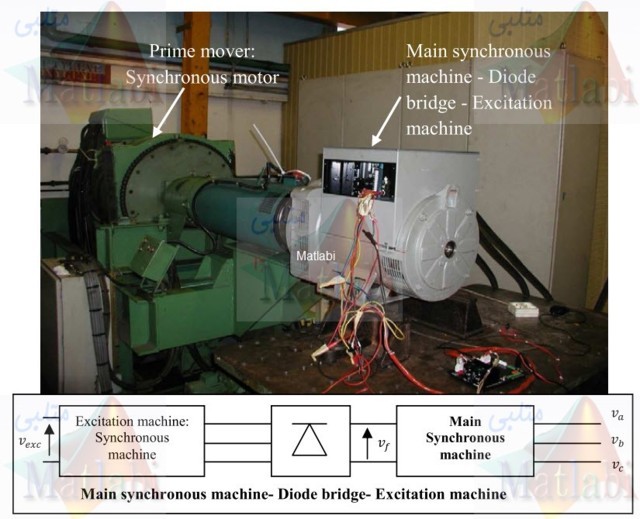
Analysis of synchronous machine modeling for simulation and industrial applications
آنالیز مدل سازی ماشین سنکرون برای برنامه های کاربردی شبیه سازی و صنعتی
دارای 8 صفحه گزارش در قالب ورد است.
شبیه سازی در محیط سیمولینک متلب انجام شده است.(با متلب 2023 تست و اجرا شده است)
نتایج بدست آمده از شبیه سازی با متلب:
به منظور شبیه سازی مدل کامل ماشین و بررسی رفتار آن تحت خطای سه فاز که در زمان t=0 یعنی پیک ولتاژ فازa اتفاق می افتد از معادلات بخش 1-1-1 استفاده می گردد. البته گرچه ما در اینجا مقادیر نهایی محاسبه شده در قسمت قبل را به عنوان مقادیر اولیه به انتگرال گیرهای مربوطه دادیم برای اطمینان از این که هنگام بروز خطا ماشین در حالت دائمی خود قرار دارد خطا را در t=4.75sec که در آنحا هم ولتاژ فازa در مقدار پیک مثبت است اعمال می گردد. و پس از 20 سیکل 60 هرتز(334/0 ثانیه)خطا رفع می شود.
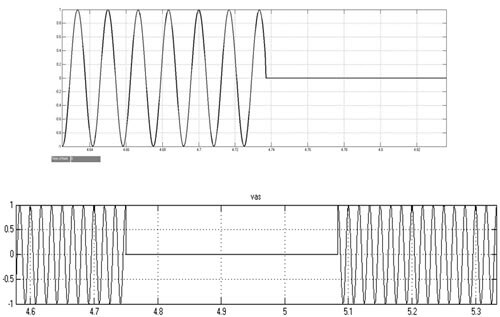
شکل(2-1): ولتاژ فاز a
نتایج حاصل ازشبیه سازی توسط این معادلات به فرم زیر خواهد بود:
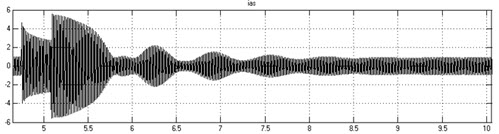
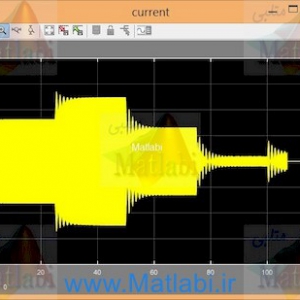
شکل(2-2): شکل موج جریان فازa
چنانچه مشاهده می گردد به هنگام بروز خطای سه فاز ناگهان دامنه جریان زیاد شده و ضمن نوسان با فرکانس سیستم(60 هرتز)دامنه جریان به صورت نمایی با ثابت زمانی مدار آرمیچرکاهش می یابد. این رفتار ماشین در هنگام بروز خطای اتصال کوتاه مانند رفتار یک مدار RL قابل توجیه است.
در یک مدار RL مانند شکل(2-3) چنانچه مشاهده می شود جریان اتصال کوتاه شامل یک مولفه سینوسی با فرکانس منبع و یک مولفه گذراست که مقدار دامنه آن وابسته به زمان اتصال کوتاه می باشد. در ماشین سنکرون نیز به هنگام اتصال کوتاه حالتی مشابه مدار RL اتفاق می افتد با این تفاوت که مقدار در ماشین سنکرون مقدار ولتاژ داخلی ماشین در هنگام خطا متغیر است چراکه شار سیم پیچ تحریک درهنگام خطا متغیر است. باید توجه داشت که هنگام خطا جریان ناشی از Eaf ، یعنی ولتاژ القا شده در استاتور توسط تحریک است و لذا چون سرعت در حدود سرعت سنکرون می ماند فرکانس Eaf و ر نتیجه فرکانس جریان هنگام خطا در حدود 60 هرتز باقی می ماند. در سیستم مورد شبیه سازی زمان وقوع خطا به طوری است که مقدار مولفه گذرا بسیار کوچک است باید توجه داشت که در ماشین سنکرون هنگام بروز خطای اتصال کوتاه سه فاز متقارن درابتدا ( چند سیکل اول) دامنه مولفه ac بالاتر از حد مورد انتظار می باشد این امر ناشی از قانون عدم پرش ناگهانی شار می باشد که بیان می کند در یک سلف با مقاومت و emf محدود سار به طور ناگهانی تغییر نمی کند. به هنگام بروز خطای سه فاز جریان ناگهان افزایش یافته و شار زیاد می شود ولی سیم پیچهای میراکننده و تحریک اجازه تغییر ناگهانی شار خود را نداده و لذا کل شار اضافی استاتور از فاصله هوایی عبور کرده ولذا شار استاتور یک مسیر مغناطیسی پر مقاومت(راکتانس زیر گذرا) در مقابل خود می بیند و جریان آن از حد مورد انتظار بالاتر می رود. پس از چند سیکل اثر سیم پیچ های دمپر از بین می رود ولی سیم پیچ تحریک همچنان به علت خاصیت سلفی بالای خود به شار استاتور اجازه عبور نمی دهد و لذا شار استاتور گرچه از سیم پیچ های دمپر عبور می کند و لی از سیم پیچ تحریک عبور نکرده و مسیر خود را از فاصله هوایی می بندد و استاتور در مقابل خود راکتانس گذرا را خواهد دید. به مرور زمان شار از سیم پیچ تحریک نیز عبور کرده و از مسیر آهنی مسیر خور را می بندد و تا ماشین به حالت ماندگار برسد. در بازه خطا چنانچه در شکل (2-5) نمایش داده شده زوایه گشتاور تا حدود 170 در جه می رسد و پس از رفع خطا و اتصال مجدد زنراتور به شبکه می بایستی تا رسیدن زاویه گشتاور به مقدار ماندگار جریان زیادی کشیده شود تا توان شبکه تامین شود لذا پس از رفع خطا جریان با یک افزایش ناگهانی در ابتدا به حالت ماندگار خواهد رسید. علت نوسانات فرکانس پایین جریان همان نوسانات زاویه رتور است که در ادامه خواهیم دید.
به هنگام بروز خطا جریان استاتور افزایش یافته و باعث ایجاد یک mmf بزرگ در فاصله هوایی می گردد. از آنجا که بین سیم پیچ تحریک و سیم پیچهای استاتور نوعی کوپل ترانسفورمری وجود دارد لذا سیم پیچ تحریک برای مقابله با این mmf جریان زیادی کشیده و جریانش چنانکه در شکل (2-4) نمایش داده شده افزایش می یابد و به مرور زمان با کاهش جریان(mmf) استاتور کم می گردد. در هنگام رفع خطا وضعیت مشابهی رخ می دهد.
به هنگام بروز خطا وجود مولفه dc در جریانهای فاز ماشین باعث ایجاد یک میدان ثابت در فاصله هوایی می گردد که دامنه آن به صورت نمایی کاهش می یابد. این مولفه میدان باعث القای جریانهایی در سیم پیچ تحریک که تقریباً با سرعت سنکرون می گردد می گردد لذا نوسانات 60 هرتز موجود در جریان تحریک مربوط به این امراست. از طرفی چنانچه در
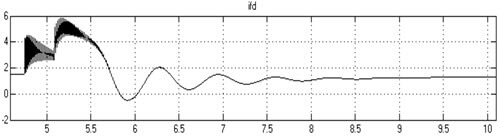
شکل(2-4): شکل موج جریان
شکل(2-2) دیده شد به هنگام بروز خطا دامنه مولفه نوسانی جریان فازها به هنگام بروز خطا دامنه مولفه نوسانی جریان فازها زیاد شد که باعث ایحاد میدان گردان با دامنه بزرگتر از قبل از خطا خواهد شد.
به هنگام بروز خطا و صفر شدن ولتاژ ترمینال ماشین توان انتقالی به شبکه صفر خواهد شد و گشتاور الکترومغناطیسی به صورت نمایی با نوسانات 60 هرتز با متوسط تقریباً صفر(به علت وجود تلفات مس در ماشین) به سمت صفر شدن میل می کند و از آنحا که گشتاور ورودی ثابت فرض می شود لذا کلیه توان مکانیکی انتقالی به ماشین به صورت انرژی جنبشی در رتور ذخیره شده و باعث بالا رفتن سرعت رتور به صورت خطی می گردد. چنانچه مقدار گشتاور الکترومغناطیسی را ثابت و مساوی صفر فرض کنیم داریم:
معادلات اینجا آورده نشده و در گزارش کار این پروژه موجود است.
زمان رفع خطا می باشد و زمان شروع خطا.
البته رابطه خطی فوق یک رابطه تقریبی برای سرعت می باشد چرا که گشتاور الکترومغناطیسی حول مقدار صفر نوسان میکند و این نوسانات حول صفر باعث ایحاد نوساناتی در سرعت خواهد شد که در شکل(2-5) می توان آنها را مشاهده
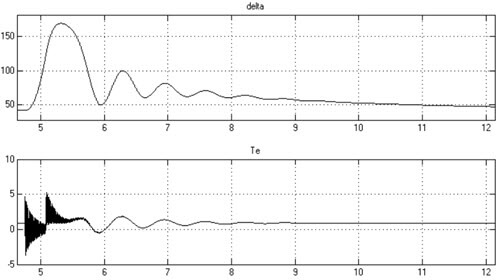
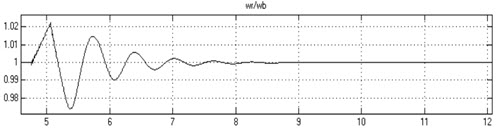
شکل(2-5): تغییرات زاویه گشتاور، گشتاور الکترومغناطیسی و سرعت
کرد.پس از رفع خطا Te>Tm خواهد شد(چراکه هنگام رفع خطا ό تا حدود °120 افزایش یافته) و لذا ماشین شتاب منفی گرفته و سرعتش کم خواهد شد. از طرفی از آنجا که زاویه گشتاور موقعیت رتور و ولتاژ فاز a را مشخص می کند با سرعت گرفتن رتور زاویه گشتاور هم زیاد خواهد شد. این افزایش زاویه به علت اینرسی رتور حتی پس ار رفع خطا ادامه خواهد داشت تا جایی که کل انرژی جنبشی ذخیره شده در رتور تخلیه شود (سرعت رتور دوباره به pu1برسد). برای ژنراتور مورد بررسی این زاویه تا حدود 170 خواهد رسید که بیانگر این است که چنانچه زمان رفع خطا اندکی طولانی تر شود ماشین ناپایدار خواهد شد..
تا به حال در مورد نوسانات گشتاور الکترومغناطیس صحبت شد ولی دلیل آن ناگفته ماند، چنانچه می دانیم:(معادله اینجا نیامده است) از طرفی گفتیم که به هنگام بروز خطا حریانهای فاز شامل یک مولفه نوسانی و یک مولفه نمایی هستند. این مولفه نمایی در دستگاه مختصات رتور به صورت یک مولفه نوسانی با فرکانس گردش رتور(تقریباً 60 هرتز) در خواهد آمد و لذا و همانطور که در شکل (2-6) نمایش داده شده است
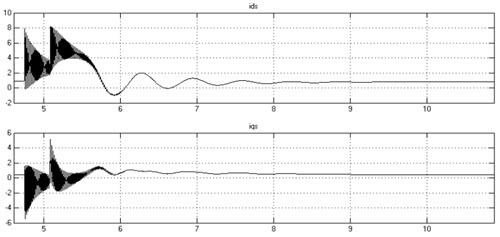
شامل یکسری نوسانات 60 هرتز هستند که باعث ایجاد نواسانات 60 هرتز در گشتاور الکترومغناطیسی خواهند شد. در شکل(2-6) تغییرات جریانهای محورهای dq نمایش داده شده است.
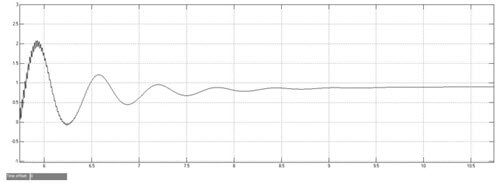
در شکل (2-7) که تغییرات گشتاور الکترمغناطیسی بر حسب زاویه گشتاور نمایش داده شده است نوسانات گشتاور واضح تر دیده می شود.
نتایج فوق در بعضی از اسکوپ ها, شامل برش بخشی از نمودار مربوطه است. بعد از ران باید اتو اسکیل کرد و نتایج را با دابل کلیک بر روی هر اسکوپ مشاهده نمود.
کلید واژه : ماشین سنکرون
Equivalent circuit, State space modeling, Synchronous machine, Sudden short-circuit
شبیه سازی آنالیز مدل سازی ماشین سنکرون برای برنامه های کاربردی شبیه سازی و صنعتی با متلب
طبق توضیحات فوق تهیه و به تعداد محدودی قابل فروش می باشد.
سفارش انجام پروژه مشابه
درصورتیکه این محصول دقیقا مطابق خواسته شما نمی باشد،. با کلیک بر روی کلید زیر پروژه دلخواه خود را سفارش دهید.