توضیحات
كنترل یک سیستم چند متغیره با استفاده از روشهای نقطه یاب پسرو
از مقاله زیر به عنوان رفرنس استفاده شده است:
An optimal feedforward control design for the set-point following of MIMO processes
شبیه سازی در محیط ام فایل متلب انجام شده است.
دارای گزارش ورد 52 صفحه ای می باشد. (گزارش شامل آموزش شبیه سازی نیست. فهرست مطالب در زیر آمده است)
توضیحات پروژه کنترل سیستم چند متغیره
این پروژه, شبیه سازی مقاله نیست و از مقاله به عنوان رفرنس استفاده شده است. توضیحات پروژه به صورت زیر است:
فهرست گزارش ورد به صورت زیر است:
فصل دوم : طراحي کنترل کننده با روش INA 7
2-2- طراحي کنترل کننده قطري 10
فصل سوم : طراحي کنترل کننده با روش Loci Characteristic 12
3-1- طراحي جبرانساز در فرکانس بالا 12
3-2- طراحي جبرانساز در فرکانس مياني 16
3-3- طراحي جبرانساز در فرکانس پايين 19
فصل چهارم : طراحي کنترل کننده با روش LQG/LTR 25
4-3- طراحي جبرانساز LQG/LTR 28
4-3-2- طراحي رگولاتور بهينه و بازيابي حلقه 36
مقدمه
همگام با توسعه سريع صنايع مدرن، مصرف انرژي و هزينههاي آن سالانه افزايش مييابد. افزايش شديد هزينههاي انرژي تغييراتي را در فلسفه طراحي سيستمهاي کنترل فرايند بوجود آورده است. مشکل جدي که با آن روبرو هستيم اين است که چگونه صرفه جويي انرژي را بهبود بخشيم.
سیستم که در اين پروژه به عنوان سيستم کنترلشونده مورد بحث قرار ميگيرد ، نمونهاي از فرايندهاي پتروشيمي است که انرژي بسيار زيادي را مصرف ميکند. هدف طراحي در اينجا بدست آوردن يک سيستم کنترل عملي با صرفه جويي انرژي براي گرمکننده است.
سيستم مورد نظر يک سيستم چند ورودي –چندخروجي(MIMO) است. در سيستمهاي MIMO معمولا تغيير هر يک از وروديها، در تمام خروجيها تاثير ميگذارد که اين پديده به عنوان تزويج يا برهمکنش سيستم شناخته ميشود که در بسياري از سيستمهاي کنترل نامطلوب است. هدف روشهاي کنترل از بين بردن اين برهمکنش هاست به نحوي که يک ورودي تنها روي يک خروجي تاثير بگذارد و هر خروجي تنها از يک ورودي تاثير بپذيرد .
در اين پروژه سه روش کلاسيک طراحي سيستمهاي کنترل چندمتغيره زير براي کنترل سيستم گرمکننده روغن مورد استفاده قرار گرفته است که عبارتند از :
- روش آرايه معکوس نايکوييست[1] (INA)
- روش مکان مقادير ويژه[2] (CL)
- روش بازيابي حلقه/ فرم مربعي گوسي[3] (LQG/LTR)[1]– Inverse Nyquist Array[2]– Characteristic Loci[3]– Linear Quadratic Gaussian/Loop Transfer Recovery
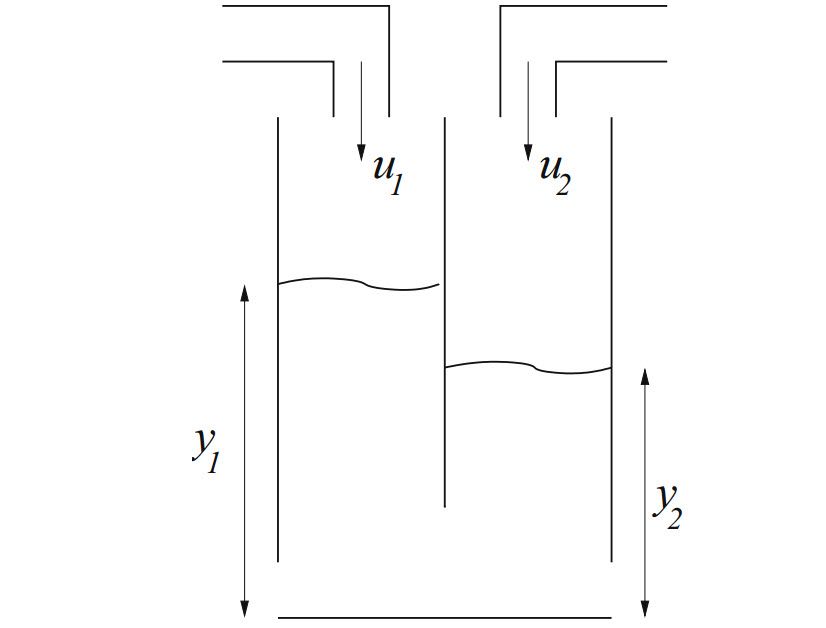
1-1- معرفي سيستم
دياگرام سيستم مورد نظر در شکل(1-1) نشانداده شده است.مايعي که بايد گرم شود نوعي روغن با نام تجاري DOWTHERM A است که براي تبادل حرارت در مراحل بعدي پروسه مورد استفاده قرار ميگيرد. دماي روغن خروجي حدود °C320 است. روغن پس از تبادل حرارت در مراحل بعدي با دماي حدود °C285 مجددا وارد گرمکننده ميشود.
سيستم داراي دو ورودي کنترلي و دو خروجي کنترلشونده است. وروديهاي کنترلي عبارتند از :
- فشار سوخت ورودي به مشعلها
- جهت دريچه کانال هواي خروجي
و خروجيهاي کنترل شونده عبارتند از :
- دماي روغن خروجي
- درصد اکسيژن درون کانال
سيستم کنترل دو وظيفه اصلي را بر عهده دارد . نخست اينکه دماي خروجي را با کمترين نوسان ممکن و با يک پاسخ با سرعت قابل قبول در مقدار پيش تنظيم نگه دارد. در نقطه کار نرمال، نوسان دماي خروجي نبايد از °C1± تجاوز کند. وظيفه دوم کاهش درصد اکسيژن به ميزان ممکن است، چراکه راندمان گرمازايي گرمکننده به ميزان اکسيژن بستگي دارد. در شرايط مناسب درصد اکسيژن پايينتر، راندمان گرمازايي بالاتري را موجب مي شود.
فعاليتهاي تجربي نشان داده است که نوسان در فشار سوخت نه تنها دماي خروجي را تحت تاثير قرار ميدهد، بلکه در درصد اکسيژن درون کانال نيز تاثير دارد. وقتي فشار سوخت پايين آورده ميشود، درصد اکسيژن افزايش مييابد و همچنين راندمان گرمازايي نيز کاهش مييابد. از طرف ديگر فعاليتهاي تجربي نشان داده است که وقتي دريچه بسته ميشود، درصد اکسيژن کاهش مييابد، اما دماي خروجي نيز افزايش مييابد. بنابراين برهمکنش شديدي بين متغيرهاي کنترل شونده و وروديهاي کنترل وجود دارد.
در اینجا فقط بخشی از متن گزارش را آورده ایم. برای تهیه فایل کامل شبیه سازی و گزارش کار بایستی این محصول خریداری شود.
طراحي کنترل کننده با روش INA
روش طراحي آرايه نايکوييست براي سيستمهاي با تابع تبديل مربعي به کار ميرود. اساس اين روش تبديل ماتريس تابع تبديل سيستم به يک ماتريس قطري غالب به منظور حذف تزويج درون سيستم و سپس استفاده از روشهاي SISO براي تست پايداري و طراحي کنترلکننده است. در روش INA طراحي بر اساس معکوس تابع تبديل سيستم انجام ميشود.
1-1- رسيدن به فرم قطري غالب
مرحله اول طراحي در روش INA تبديل ماتريس معکوس تابع تبديل سيستم به يک ماتريس قطري غالب است. در اين روش با توجه به اينکه از معکوس تابع تبديل استفاده ميشود جبرانسازهاي طراحي شونده در معکوس تابع تبديل پيشضرب مي شوند، لذا براي حفظ قطري بودن سيستم، بهتر است فرم قطري غالب سطري[1] يا RDD بدست آيد.
[1]– Row Diagonal Dominant
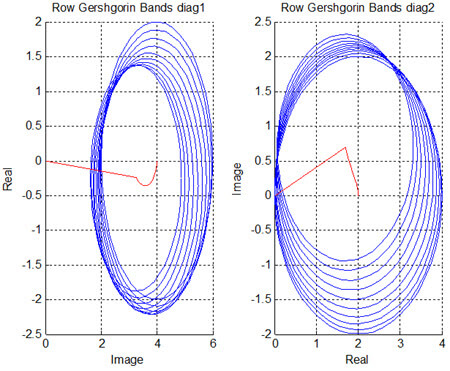
شکل (2-1) باندهاي گرشگورين سيستم معکوس
شکل (2-1) باندهاي گرشگورين سيستم معکوس را در محدوده 0-0.1 rad/s نشان ميدهد. همانگونه که مشاهده ميشود باندهاي گرشگورين مربوط به درايه قطري دوم شامل مبدا ميباشند،
بنابراين ماتريس به فرم DD نميباشد. روشهاي مختلفي براي رسيدن به فرم قطري وجود دارد که سادهترين آن استفاده از بهره سيستم در يک فرکانس خاص، مثلا DC ، به عنوان جبرانساز است.
با قرار دادن اين جبرانساز به طور سري با سيستم تابع تبديل حلقهباز به فرم در ميآيد. باندهاي گرشگورين معکوس سيستم با جبرانساز در شکل (2-2) نشان داده شده است. همانطور که مشاهده ميشود، باندهاي گرشگورين براي هر دو درايه قطري تمام محدوده فرکانسي بسيار باريک شده و شامل مبدا نميباشد. بنابراين فرم قطري غالب محقق شده است. در اينجا براي در نظر گرفتن تلرانس اندازهگيريها به جاي قرار دادن مقدار دقيق جبرانساز از مقادير گرد شده استفاده شده است. پاسخ پله سيستم حلقه باز با پيش جبرانساز نيز در شکل (2-3) نشان داده شده است. همانطور که انتظار ميرفت برهمکنش بين ورودي و خروجيها تقريبا بهطور کامل از بين رفته است. در شکل (2-4) پاسخ خروجيهاي برهمکنشي در مقياس بزرگتر نشان داده شده است.
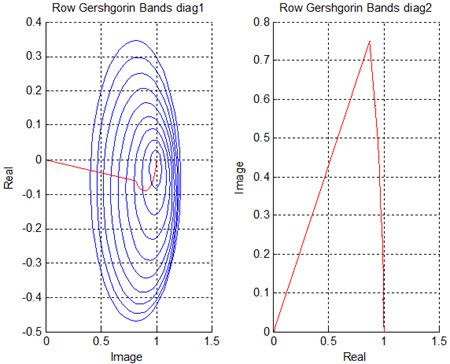
شکل (2-2) باندهاي گرشگورين معکوس سيستم با جبرانساز
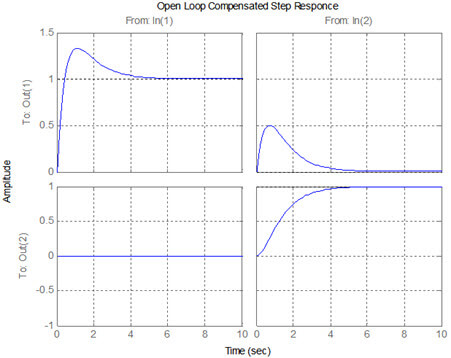
شکل (2-3) پاسخ پله سيستم حلقه باز با پيش جبرانساز
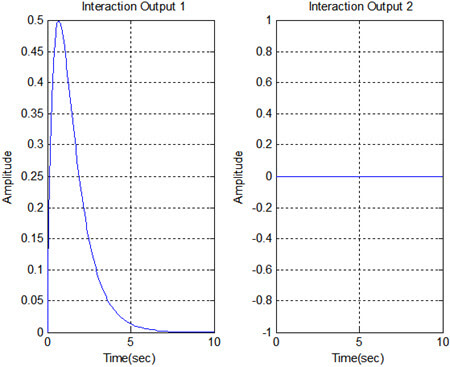
شکل (2-4) پاسخ خروجيهاي برهمکنشي در مقياس بزرگتر
در اینجا همه نتایج و گزارش ورد نیامده است.
طراحي کنترل کننده قطري
پس از آنکه برهمکنش دروني با قطري شدن سيستم کاهش يافت، حال ميتوان خروجيها را به صورت مجزا توسط ورودي مربوطه کنترل کرد. در واقع سيستم MIMO به دو زير سيستم SISO
مجزا تبديل شده است. در شکل (2-5) پاسخ پله سيستم حلقهبسته با فيدبک واحد نشان داده شده است. همانطور که مشاهده ميشود پاسخ داراي خطاي حالت ماندگار است و همچنين داراي سرعت نامناسبي است. حال براي بهبود پاسخها ميتوان از کنترلکنندههاي کلاسيک مانندPI يا PID استفاده کرد.
طراحي کنترل کننده با روش Loci Characteristic
در روش طراحي Loci Characteristic ، مقادير ويژه ماتريس تابع انتقال مورد توجه قرار ميگيرند. اين مقادير ويژه مانند خود عناصر ماتريس تابع انتقال تابع فرکانس هستند. طراحي در اين روش شبيه به روش نايکوييست در طراحي سيستمهاي SISO است. در اين روش سه جبرانساز مجزا در محدوده فرکانسي بالا، متوسط و پايين طراحي ميشود.
طراحي جبرانساز در فرکانس مياني
همانگونه که در نمودار نيکولز و بد مقادير ويژه سيستم جبرانشده در فرکانس بالا مشاهده ميشود، مشخصه فاز سيستم مناسب نميباشد. براي رسيدن به حد بهره و فاز مطلوب در فرکانس مياني 0.05 rad/s ، يک جبرانساز در اين فرکانس طراحي ميکنيم.
نحوه طراحي به اين صورت است که جبرانسازهاي پيش فاز يا پس فاز براي اصلاح هر يک از مقادير ويژه در فرکانسهاي مياني طراحي مي شود که در فرکانسهاي بالا بياثر باشند. بدين منظور از کنترلکننده هاي ACC[1] استفاده ميشود.
[1]– Approximate Commute Controller
طراحي کنترل کننده با روش LQG/LTR
روش طراحي LQG/LTR ، بر اساس تئوري کنترل بهينه ميباشد. مهمترين تئوري مورد استفاده در اين روش مساله LQG ميباشد. اين روش به طراح اجازه داده ميدهد که بهرههاي اساسي نرخ بازگشت[1] را در ورودي يا خروجي سيستم شکل دهد تا به عملکرد يا خصوصيات مقاوم مورد نياز دست يابد. پايداري اين روش به طور اتوماتيک تضمين ميشود، بنابراين نيازي به بررسي آن وجود ندارد.
[1]– Return Ratio
در این صفحه امکان قرار دادن تمام نتایج بدست آمده از شبیه سازی با متلب را نداریم و توضیحات در گزارش ورد نیز بسیار طولانی است. لذا بخش هایی از توضیحات را در اینجا برای مشاهده قبل از خرید قرار داده ایم.
شاید به موارد زیر نیز علاقه مند باشید:
- مدل سازی، شبیه سازی و کنترل یک گرم کننده نفتی
- کنترل مقاوم یک ستون تقطیر
- طراحی و شبیه سازی سیستم های کنترل برای بستر های درست ربات موبایل سروی
- پروژه آموزشی کنترل چندمتغیره با مدل مقاله کنترل غیر خطی و چند متغیره قسمت تقطیر از قسمت تولید متانول
- یک روش طراحی کنترل کننده خطی MIMO برای بهینه سازی مقاوم و درجه دوم
کلیدواژه:
Multivariable processes,Feedforward control, Constrained control, Minimum-time transition, Multiobjective optimisation problem, PID control
فرآیندهای چند متغیره, کنترل پیشخور, کنترل محدود, انتقال حداقل زمان, مسئله بهینه سازی چندهدفه, کنترل PID
كنترل یک سیستم چند متغیره با استفاده از روشهای نقطه یاب پسرو با متلب
طبق توضیحات فوق تهیه شده است و به تعداد محدودی قابل فروش می باشد.
سفارش انجام پروژه مشابه
درصورتیکه این محصول دقیقا مطابق خواسته شما نمی باشد،.
با کلیک بر روی کلید زیر پروژه دلخواه خود را سفارش دهید.






دیدگاهها
هیچ دیدگاهی برای این محصول نوشته نشده است.