توضیحات
اتوماتای یادگیر سلولی برای یک ربات خودکار زیر آبی برای عبور از موانع
از این مقاله برای پیاده سازی و مقایسه نتایج بهره گرفته شده است:
Adaptive low-level control of autonomous underwater vehicles using deep reinforcement learning
شبیه سازی در محیط ام فایل متلب انجام شده است.
دارای گزارش ورد 19 صفحه ای است.
توضیحات پروژه
این پروژه از 3 بخش تشکیل شده است:
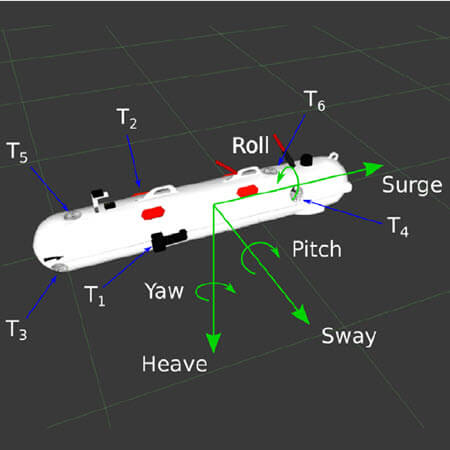
دینامیک AUV
الگوریتم اتوماتای سلولی جهت عبور از مانع و رسیدن به نقطه هدف
کنترلر جهت حرکت ربات در مسیر طراحی شده به روش اتوماتا
در گزارش این پروژه در مورد تئوری دینامیک ربات توضیح داده شده است.
سپس در مورد کنترل مود لغزشی
کنترل مود لغزشی
به طور خلاصه میتوان گفت که در کنترل مد لغزشی حالتهای سیستم به یک سطح، به نام سطح لغزش در فضای حالت برده میشوند. وقتی حالتها به سطح لغزش رسیدند، کنترل مد لغزشی حالتها را در نزدیکی و همسایگی سطح لغزش نگه میدارد. بنابراین، این رویکرد، یک روش کنترلی با دو بخش است. در بخش اول یک سطح لغزش طراحی میشود که حرکت لغزشی مشخصات طراحی را برآورده کند. در بخش دوم، قانون کنترلی انتخاب میشود که با آن، سطح سوئیچنگ حالت سیستم را جذب کند.
کنترل مد لغزشی دو مزیت اصلی دارد. اولین مزیت این است که میتوان با انتخاب تابع لغزشی مناسب، به رفتار دینامیکی مطلوب سیستم دست یافت. مزیت دوم این است که پاسخ حلقهبسته سیستم هیچ حساسیتی نسبت به نامعینیها (پارامترهای مدل، اغتشاشها و غیرخطی بودن) ندارد. در نتیجه، از دیدگاه عملی، با استفاده از کنترل مد لغزشی میتوانیم فرایندهای غیرخطی را در حضور اغتشاشات و نامعینیهای مدل کنترل کنیم.
و در ادامه به روابط آن در گزارش پرداخته شده است.
اتوماتای سلولی
اتوماتای سلولی مدلی از ریاضیات گسسته است که در مباحثی چون نظریه محاسبهپذیری، ریاضیات، فیزیک، سامانههای انطباقی پیچیده، زیستشناسی نظری و ریز ساختارها مورد مطالعه قرار گرفته است. اتوماتای سلولی با نامهایی مانند فضاهای سلولی، اتوماتای مفروشسازی، ساختارهای همگن، ساختارهای سلولی، ساختارهای مفروشسازی و آرایههای تکرار شونده نیز بیان میگردد.
یک اتوماتای سلولی شامل یک شبکه منظم از سلولها است که هر کدام از آنها در یکی از حالتهای مجموعه حالات متناهی امکانپذیر مانند On و Off، قرار دارند. شبکه میتواند هر بعد متناهی داشته باشد. برای هر سلول، یک مجموعه از سلولها که همسایهٔ آن نامیده میشود، نسبت به آن سلول مشخص تعریف شده است. یک حالت آغازین (زمان t = ۰) با تخصیص دادن یک وضعیت به هر سلول انتخاب میشود.
یک نسل جدید یا تکامل (توسعه t به وسیله ۱)، بر اساس یکسری قوانین ثابت (عموماً یک تابع ریاضی) تولید میشود که وضعیت جدید برای هر سلول را بر اساس وضعیت جاری آن سلول و وضعیتهای سلولهای همسایه آن مشخص میکند. به صورت معمول، قوانین به روزرسانی وضعیت سلولها برای هر سلول مشابه است و در طول زمان تغییر نمیکند و به کل شبکه به صورت همزمان اعمال خواهد شد. البته استثناهایی مانند اتوماتای سلولی تصادفی و اتوماتای سلولی ناهمگام نیز وجود دارند.
شبیه سازی
در پوشه simulation تعدادی پوشه دیگر وجود دارد.
پوشه sim1: این شبیه سازی به این صورت در نظر گرفته شده است که ربات از نقطه (0,0) شروع به حرکت نماید و به نقطه (10,10) برسد. این شبیه سازی صرفا برای نشان دادن دقت الگوریتم های ترکیب شده می باشد. با اجرای فایل main نمودار زیر به دست می آید:
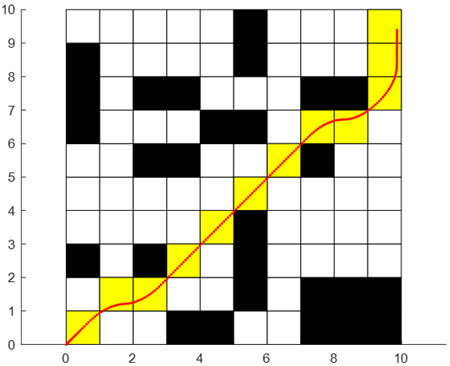
نقاط زرد رنگ، مسیر مرجع طراحی شده از الگوریتم اتوماتا و مسیر قرمز رنگ، مسیری است که ربات با کمک کنترلر طی کرده است. ملاحظه می شود که مسیر مرجع به دقت طراحی شده تا اهداف مساله تامین شود. هم چنین کنترلر به خوبی ربات را در این مسیر به پیش برده است.
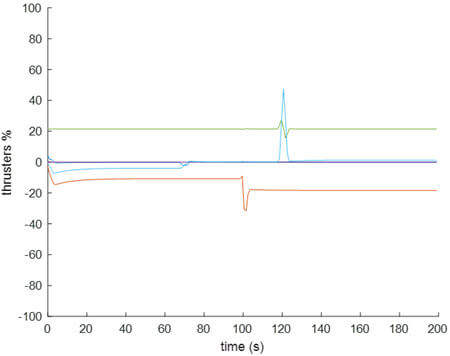
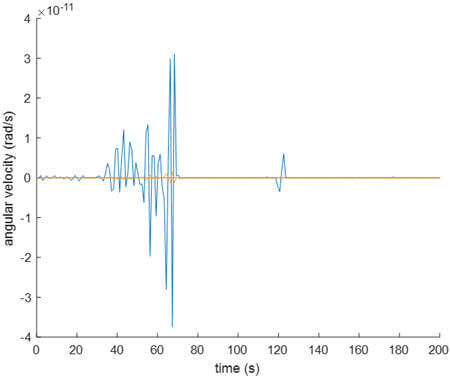
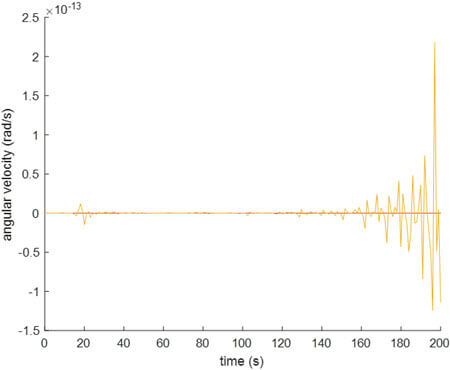
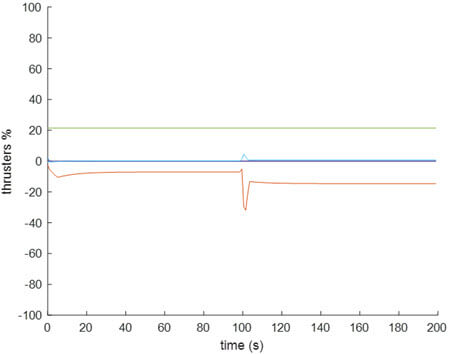
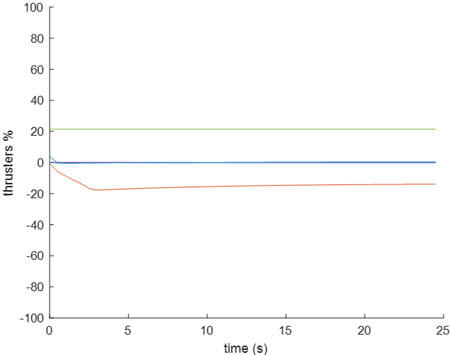
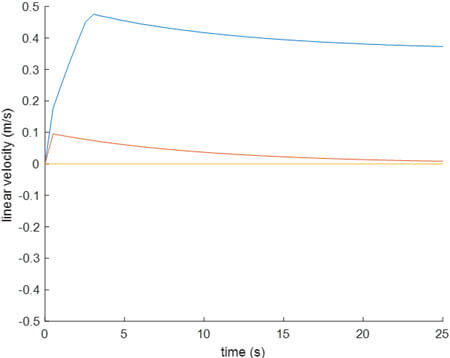
پوشه sim2: این شبیه سازی برای مقایسه نتایج به دست آمده با شکل 6 مقاله انجام شده است. برای این منظور سرعت های خطی مرجع تا ثانیه 100 برابر با (0.3,0.2,0.2) و از آن به بعد برابر با (0.5,0,0) هستند. از این شبیه سازی به بعد برای این که بتوان نتایج را با مقاله مقایسه نمود، موانع را در نظر نمی گیریم و یک فضای کاری 100 در 50 بدون مانع را فرض می کنیم. فرض می شود ربات در ابتدا در نقطه (1,20) قرار دارد. برای دست یابی به آن سرعت ها، مسیر مرجع باید طوری تعریف شود که تا ثانیه 100 مکان ربات به نقطه (30,40) برسد و پس از آن ربات به نقطه (80,40) برود.

ملاحظه می شود همانند مقاله، سرعت های خطی تغییرات پله ای دارند و در حدود تغییرات مقاله هستند.
سرعت های زاویه همانند مقاله حول صفر هستند و مقادیر بسیار اندکی دارند.
ورودی های کنترلی (تراسترها) نیز مقادیرشان بین 0 تا 100 است.
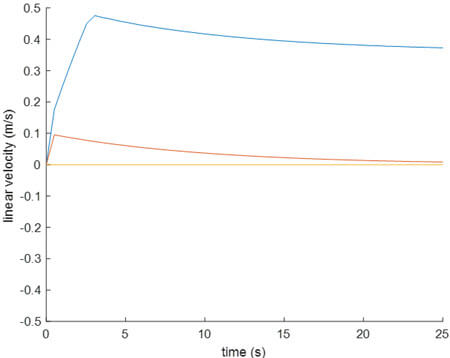
پوشه Sim3: شبیه سازی شکل 8 مقاله است. در این شبیه سازی تنها سرعت خطی x از 0.2 به 0.4 می رسد و باقی صفر هستند.

ملاحظه می شود که دوباره نتایج مانند مقاله به دست آمدند.
پوشه Sim4: شبیه سازی شکل 9 مقاله است که در آن فقط باید سرعت خطی x برابر 0.4 باشد.
پوشه Sim5: همان شبیه سازی قبل است با این تفاوت که Vx باید منفی 0.4 شود.
کلیدواژه:
Autonomous robot, Deep reinforcement learning, AUV, Adaptive low-level control
اتوماتای یادگیر سلولی برای یک ربات خودکار زیر آبی برای عبور از موانع
طبق توضیحات فوق توسط کارشناسان سایت متلبی تهیه شده است و به تعداد محدودی قابل فروش می باشد.
سفارش انجام پروژه مشابه
درصورتیکه این محصول دقیقا مطابق خواسته شما نمی باشد،.
با کلیک بر روی کلید زیر پروژه دلخواه خود را سفارش دهید.






دیدگاهها
هیچ دیدگاهی برای این محصول نوشته نشده است.