توضیحات
Adaptive Image-Based Leader–Follower Formation Control of Mobile Robots With Visibility Constraints
شبیه سازی در محیط ام فایل متلب انجام شده است
گزارش کار ندارد.
توضیحات پروژه ربات های متحرک با محدودیت دید
در این مقاله, شکل های 7 و 8 مربوط به پروژه experimental و عملی است و قابل شبیه سازی نیست و شبیه سازی برای شکل 5 مقاله انجام شده است، در واقع نتایج برای section IV-A به دست می آیند.
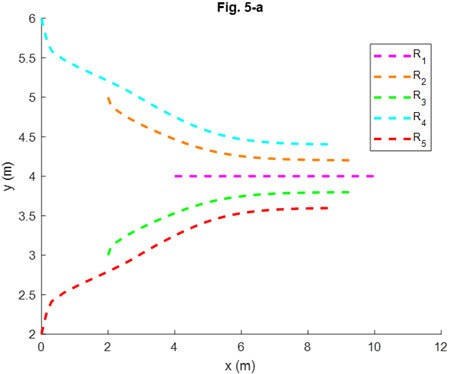
Trajectories for whole formation process, where snapshots of robot positions are provided at every two seconds
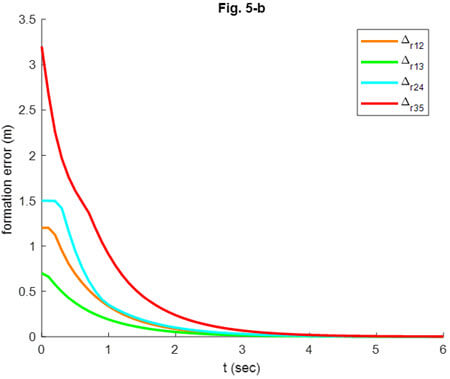
Formation error Δrij = ||rij − rij d ||, where rij and rij d are, respectively, the actual and desired relative positions between leader robot Ri and follower robot Rj
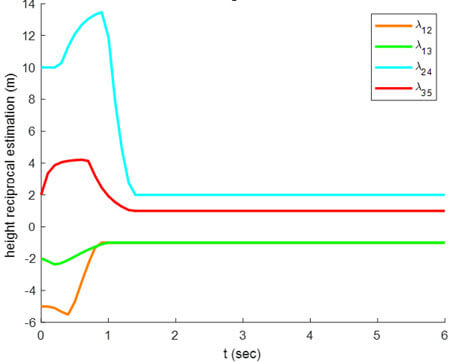
Estimation of the parameter λij = 1/hij, where hij is the relative hight between the camera onboard the robot Ri and feature point attached to the follower Rj
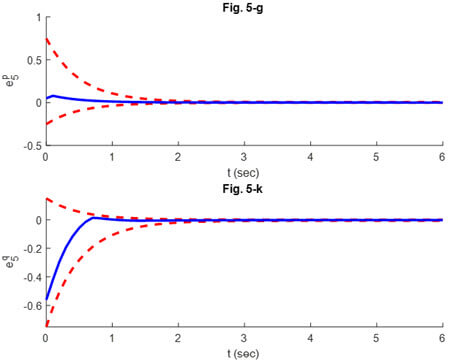
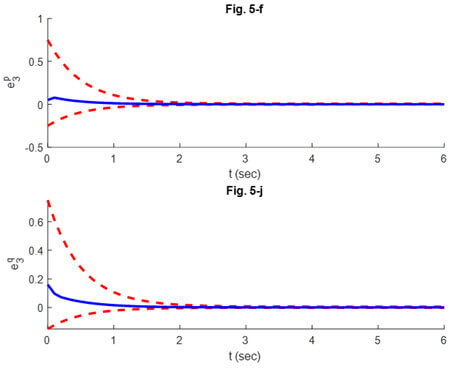
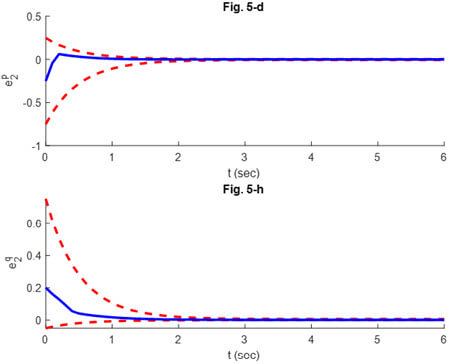
(d)–(k) Evolution of the normalized image coordinate errors (blue) along with the corresponding applied performance bounds (red), where ep i and eq i denote, respectively, the first and the second coordinate errors of each follower robot i
شاید به موارد زیر نیز علاقه مند باشید:
- Formation control and collision avoidance for multi-agent systems based on position estimation
- کنترل شبکه عصبی تطبیقی از یک کشتی دریایی سطحی تمام فعال با محدودیت خروجی چندگانه
- Third Order Sliding Mode Control with Box State Constraints
- کنترل سازند Hّبیهایت تطبیقی برای سیستم های اویلر-لاگرانژ
- پیشنهاد تولید بهینه تصادفی به بازارهای برق با محدودیت های خطر انتشار (آلایندگی)
کلیدواژه:
Formation control, mobile robots, prescribed performance, visibility constraints, visual servoing
Adaptive Image-Based Leader–Follower Formation Control of Mobile Robots With Visibility Constraints با متلب
طبق توضیحات فوق توسط کارشناسان سایت متلبی تهیه شده است و به تعداد محدودی قابل فروش می باشد.
سفارش انجام پروژه مشابه
درصورتیکه این محصول دقیقا مطابق خواسته شما نمی باشد،.
با کلیک بر روی کلید زیر پروژه دلخواه خود را سفارش دهید.






دیدگاهها
هیچ دیدگاهی برای این محصول نوشته نشده است.