توضیحات
Adaptive fuzzy sliding mode control using supervisory fuzzy control for 3 DOF planar robot manipulators
شبیه سازی در محیط سیمولینک متلب انجام شده است.
دارای ویدیو آموزشی 4-5 دقیقه ای است.
توضیحات پروژه
شبیه سازی برای دو حالت pid و دو حالت فازی و دو حالت فازی تطبیقی انجام شده است.
منظور از دو حالت, مثال های مقاله مربوطه است که دو مثال دارد. بنابراین 6حالت پیاده سازی شده است.
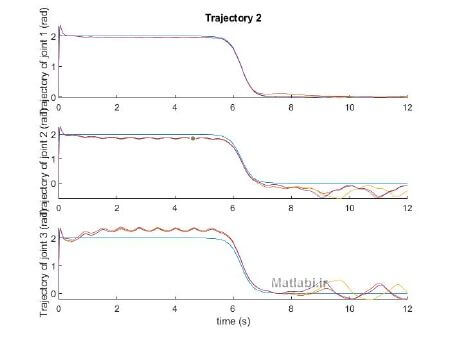
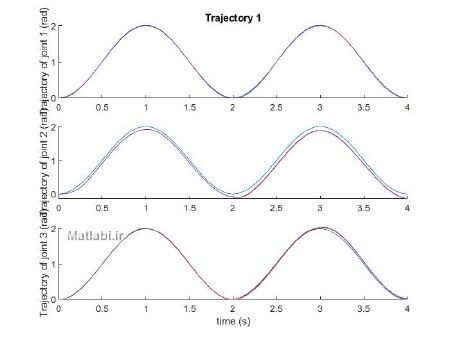
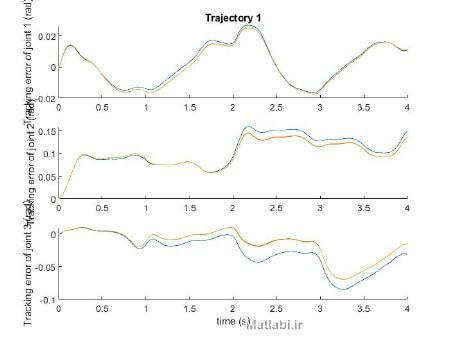
نتایج نموداری

نتایج عددی:
Table IAE for Trajectory 1
Algorithm Joint1 Joint2 Joint3
__________________ ________ _______ ________
‘Conventional SMC’ 0.045302 0.41909 0.10982
‘FSMC’ 0.045577 0.39617 0.070639
‘AFSMC’ 0.045691 0.39719 0.071689
Table ITAE for Trajectory 1
Algorithm Joint1 Joint2 Joint3
__________________ ________ _______ _______
‘Conventional SMC’ 0.094582 0.93918 0.30582
‘FSMC’ 0.093682 0.86854 0.20132
‘AFSMC’ 0.093892 0.87198 0.20371
Table IAE for Trajectory 2
Algorithm Joint1 Joint2 Joint3
__________________ _______ ______ ______
‘Conventional SMC’ 0.45157 2.3282 2.2922
‘FSMC’ 0.36659 2.272 2.3252
‘AFSMC’ 0.35631 2.1702 2.2778
Table ITAE for Trajectory 2
Algorithm Joint1 Joint2 Joint3
__________________ ______ ______ ______
‘Conventional SMC’ 2.2773 16.546 11.51
‘FSMC’ 1.5153 17.151 13.106
‘AFSMC’ 1.3931 15.818 12.459
کلیدواژه:
Fuzzy control, Robots, Sliding mode control (SMC), Uncertainties
شبیه سازی
Adaptive fuzzy sliding mode control using supervisory fuzzy control for 3 DOF planar robot manipulators
طبق توضیحات فوق توسط کارشناسان سایت متلبی تهیه شده است و به تعداد محدودی قابل فروش می باشد.
سفارش انجام پروژه مشابه
درصورتیکه این محصول دقیقا مطابق خواسته شما نمی باشد،.
با کلیک بر روی کلید زیر پروژه دلخواه خود را سفارش دهید.






دیدگاهها
هیچ دیدگاهی برای این محصول نوشته نشده است.