توضیحات
کنترل فازی مد لغزشی سروو موتور
عنوان اصلی مقاله
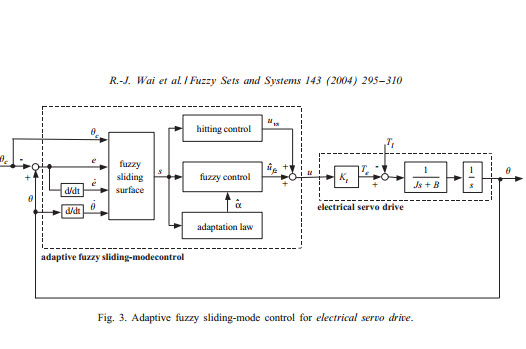
Adaptive fuzzy sliding-mode control for electrical servo drive
شبیه سازی در محیط سیمولینک متلب انجام شده است.
دارای گزارش ورد 12 صفحه ای می باشد.
توضیحات پروژه کنترل اسلایدینگ مود فازی سروو موتور
شبیه سازی با متلب 2006a انجام شده است و با متلب جدید سازگار نیست.
مقدمه
مطالعات متنوعی به جهت حل این مسئله انجام شده است. از روش های کنترل خطی، با توجه به روند سیستماتیک بودن آن در طراحی و پیاده سازی به صورت گسترده جهت حل این مسئله مورد استفاده شده است . وانگ یک کنترل کننده از نوع PD را به منظور پایدارسازی سیستم استفاده قرار داد و موثر بودن روش کنترلی پیشنهادی را به صورت عملی نشان داد. شو جای، یک کنترل کننده PID را جهت کنترل سیستم سروو موتور پیشنهاد داد . به هرحال، از عملکرد روش کنترلی PID با توجه به خطی بودن آن، نمی توان برای شرایط متفاوت پروازی اطمینان حاصل نمود. ما و ذی اچ با بهره گیری از روش کنترلی پسگام به حل مسئله پایدارسازی پرداختند. کنترل کننده پیشنهادی از سه زیر سیستم سروو موتور تقسیم شد و هر زیر سیستم سروو موتور با بهره گیری از روش کنترل انتگرالی پسگام طراحی شد. SMC با توجه مقاوم بودن در برابر عدم قطعیت ها و اغتشاشات یک روش کنترلی موثر و مفید در طراحی کنترل کننده های پروازی می باشد که عملکرد مناسبی را در مدت زمان رسیدن به پاسخ مطلوب را نیز از خود نشان می دهد. پاتل از روش SMC جهت طراحی کنترل کننده پروازی برای یک زیر سیستم سروو موتور پرداخت. تغییرات کوچک پارامترهای سیستم سروو موتور پیچیدگی طراحی کنترل کننده به منظور پایدارسازی سیستم سروو موتور را بیشتر می سازد. بنابراین یک روش کنترلی تطبیقی به منظور تخمین پارامترهای متغیر با زمان استفاده شده است. لی یک کنترل کننده مقاوم با اتخاذ یک مشاهده کننده اغتشاشات غیرخطی را ارائه نمود. اغتشاشات بوسیله یک آبزرور تخمین زده می شد و کنترل کننده با استفاده از تخمین گیر اغتشاشات وارده بر سیستم سروو موتور را دفع می نمود. مالیکار جونان، یک تئوری کنترل تطبیقی L1 را به جهت طراحی کنترلننده پایدار کننده سیستم سروو موتور کنترلی را بکاربرد. نتایج شبیه سازی نشان داد که کنترل کننده طراحی شده در مقابل عدم قطعیت های پارامتری و اغتشاشات محیطی به صورت مقاوم عمل می نماید. اگرچه تحقیقات انجام شده به جهت یک منبع جهت مقایسه با کارهای جدید مفید می باشند، اما مسئله کنترل سیستم سروو موتور هنوز نیازمند توجه بیشتر و بهبود می باشد، خصوصا برای دینامیک غیرخطی، عدم قطعیت های اینرسی و اغتشاشات خارجی.
انگیزه مطالعات فوق، مقاله حاضر را به پیشنها حل مشکل کنترل سیستم سروو موتور حاضر با استفاده از روش fuzzy sliding mode می پردازد. به منظور مقابله با عدم قطعیت های اینرسی و اغتشاشات خارجی، روش کنترلی SMC یک جایگزین مناسب و روش کنترلی مناسب می باشد. خاصیت جالب روش کنترلی SMC، این است که این روش با استفاده از قانون کنترلی و به سرعت، سیستم دینامیکی را از هر شرط اولیه ای به سمت سطح مطلوب تعیین شده در فضای حالت تغییر و نگه می دارد. SMC یک روش شناخته شده به جهت آنکه خصوصیات آن نسبت به تغییر پارامترها و اغتشاشات خارجی تغییر نمی کند می باشد. به هرحال یکی از معایب SMC،
در حال حاضر تئوری ها و روش های کنترلی روش های مبتنی بر دانش پیشین، بیشتر و بیشتر مورد توجه شده اند و به عنوان یک روش جایگزین روش های مبتنی بر مدلسازی ریاضی ظهور کرده اند. این روش برای سیستم های که مدلسازی ریاضی آن ها بسیار پیچیده و قابل انجام نمی باشد مناسب می باشد. مدل های مبتنی بر دانش پیشین به دو دسته تقسیم می شوند: روش های مستقیم و غیر مستقیم. دسته بندی دوم شامل روش های کنترلی هوشمند هم چون روش های کنترلی فازی و روش های کنترلی شبکه عصبی می باشد. در مقایسه با روش های کنترلی مبتنی بر مدل، روش های کنترلی مبتنی بر دانش، با توجه به اینکه هیچ نیازمندی از مدل سیستم وجود ندارد، توجه محققان را بیشتر به خود جلب نموده است. کنترل فازی یک دیدگاه موثر را در جهت اصطلاح روش کنترلی مدلغزشی در رابطه با کاهش پدیده چترینگ فراهم می آورد. در تقابل با مدلسازی ریاضی، روش کنترلی فازی می تواند براساس داده های ورودی – خروجی و بدون نیاز به دانش در مورد مدل صریح سیستم توسعه یابد. این ایده راه حلی است برای کنترل غیرخطی که هیچکس هیچ اطلاعاتی در مورد روابط بین داده های ورودی و خروجی ندارد.
در این مقاله، روش کنترلی مدلغزشی به صورت زیر اصلاح شده است. بهره سوئیچینگ به صورت آنلاین تغییر می یابد. منطق فازی به منظور ایجاد FSMC استفاده می شود. این سیستم به گونه ای طراحی شده است که بهره تابع ساین به صورت تطبیقی و براساس قوانین فازی تنظیم می گردد. در سیستم ایجاد شده، صفحه لغزش و مشتق آن به عنوان ورودی های فازی درنظر گرفته شده است.
در مقایسه با مطالعات پیشین انجام شده روی کنترل PID و روش کنترلی پسگام ، رویکرد کنترلی پیشنهادی، مقاوم بودن کنترل کننده را در رابطه با عدم قطعیت های پارامتری و اغتشاشات خارجی افزایش می دهد.
کارهای انجام شده در این مقاله را می توان به اختصار به صورت زیر بیان نمود:
- یک کنترل کننده فازی و موثر به منظور کنترل سیستم پیش رو با عدم قطعیت پارامتری و اغتشاشات خارجی توسعه داده شده است.
- یک سیستم فازی به صورت تطبیقی براساس قوانین فازی مبتنی بر اطلاعات صفحه لغزش، پاسخ دینامیکی مناسب را ارائه می دهد.
نتایج شبیه سازی با متلب
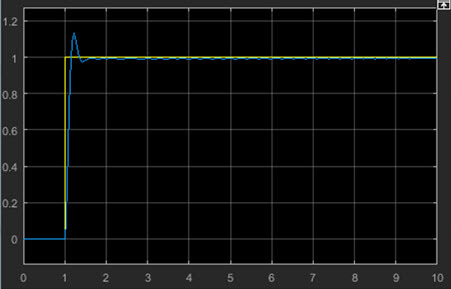
نتایج حاصل از شبیه سازی برای هر کدام از روش های کنترلی ارائه شده در مقاله به صورت زیر ارائه شده است:
علاوه بر روش فازی مطرح شده، برای قیاس نتایج حالت ساده PID نیز به صورت مجزا شبیه سازی شده است
افزودن الگوریتم FSMC
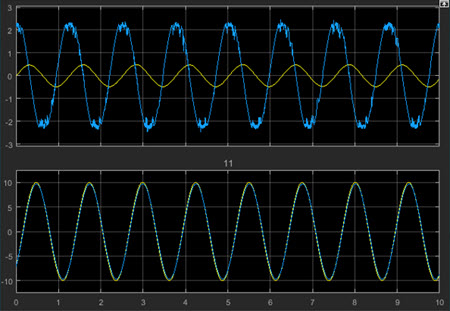
وجود تفاوت کوچک مابین نتایج شبیه سازی شده با نتایج مقاله به علت عدم ارائه برخی پارامترها در مقاله می باشد که در شبیه سازی به صورت دلخواه در نظرگرفته شده است.
شاید به موارد زیر نیز علاقه مند باشید:
- همگرایی پارامتری و کنترل سیستم آشوب با استفاده از خطی سازی بازخورد تطبیقی
- کنترل دینامیکی تطبیق پذیر برای کنترل قسمت روتور سیستم توربین بادی با تغذیه دوگانه
- کنترل سرعت موتور DC به همراه دست یابی به زمان نشست کوتاه در پاسخ سیستم
- سیستم توزیع موتور سنکرون خطی مغناطیس دائم بر اساس کنترل PID فازی
کلیدواژه:
Adaptive control, Fuzzy control, Sliding mode, Electrical servo drive
کنترل فازی مد لغزشی سروو موتور با متلب
طبق توضیحات فوق تهیه شده است و به تعداد محدودی قابل فروش می باشد.
سفارش انجام پروژه مشابه
درصورتیکه این محصول دقیقا مطابق خواسته شما نمی باشد،.
با کلیک بر روی کلید زیر پروژه دلخواه خود را سفارش دهید.






دیدگاهها
هیچ دیدگاهی برای این محصول نوشته نشده است.