توضیحات
Adaptive Commutation Error Compensation Strategy Based on a Flux Linkage Function for Sensorless Brushless DC Motor Drives in a Wide Speed Range
فایل های شبیه سازی شده با متلب به شرح زیر است:
1- فایل سیمولینک BLDC.slx که کل سیستم را در محیط سیمولینک شبیه سازی می کند.
2- فایل BEMF.m جهت محاسبه نیروی محرکه ضد حرکتی
3- فایل COMMUTATOR.m جهت پیاده سازی الگوریتم کموتاسیون
4- فایل TORQUE.m جهت محاسبه گشتاور خروجی موتور
5- فایل S1S2CALC.m جهت محاسبه انتگرالده توابع S1 و S2 که انتگرال آنها جهت تصحیح سطح کموتاسیون استفاده می شود
فایل ها در متلب نسخه 2015b آماده شده اند. جهت اجرا از همین نسخه یا نسخه های بعدی استفاده کنید.
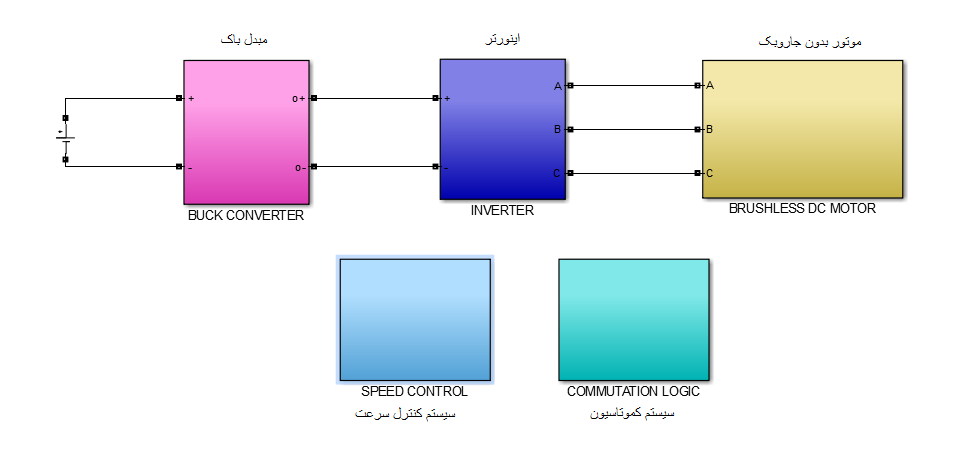
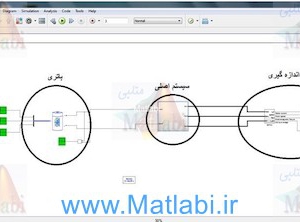
نمای فایل سیمولینک در شکل ذیل نشان داده شده است
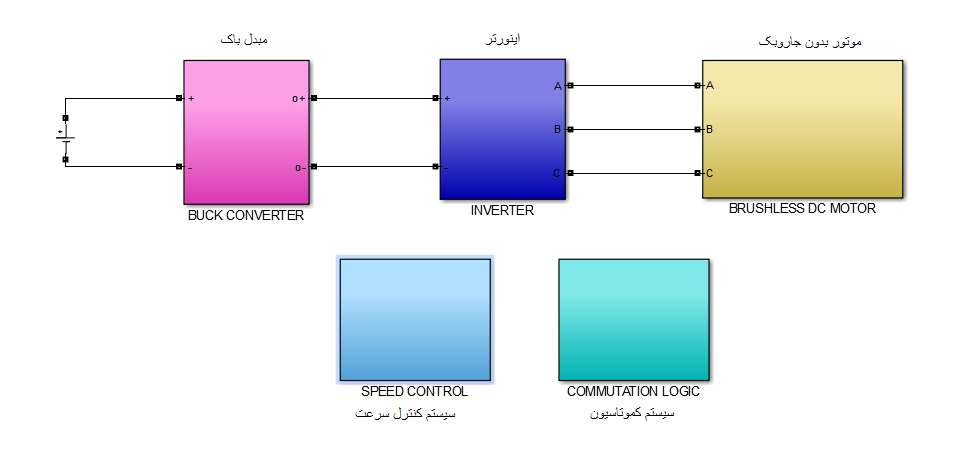
همانطور که مشاهده می شود این سیستم از بلوک های ذیل تشکیل شده است
1- بلوک BRUSHLESS DC MOTOR که مدل موتور بدون جاروبک را پیاده سازی می کند.
2- بلوک INVERTER جهت پیاده سازی اینورتر
3- بلوک BUCK CONVERTER جهت پیاده سازی مبدل باک
4- بلوک COMMUTATION LOGIC جهت پیاده سازی منطق کموتاسیون
5- بلوک SPEED CONTROL جهت پیاده سازی سیستم کنترل سرعت
نمای داخلی بلوک BRUSHLESS DC در شکل ذیل نشان داده شده است
این شکل در گزارش آمده است و اینجا نمایش داده نشده است.
نمای داخلی بلوک INVERTER در شکل ذیل نشان داده شده است
این شکل در گزارش آمده است و اینجا نمایش داده نشده است.
نمای داخلی بلوک COMMUTATION LOGIC در شکل ذیل نشان داده شده است
این شکل در گزارش آمده است و اینجا نمایش داده نشده است.
نمای داخلی بلوک SPEED CONTROL در شکل ذیل نشان داده شده است
این شکل در گزارش آمده است و اینجا نمایش داده نشده است.
در گزارش نیز فانکشن هایی که در سیمولینک استفاده شده است را در تشریح و توضیح داده ایم.
کد و توضیحات فانکشن ها در اینجا قابل نمایش نیست و با خرید قابل دریافت است.
تابع محاسبه نیروی ضد محرکه
function out=BEMF(In)
تابع منطقی کموتاسیون
function out=COMMUTATOR(In)
تابع محاسبه انتگرال ده توابع S1 و S2
انتگرال گیری در محیط سیمولینک انجام می شود
function out=S1S2Calc(In)
تابع محاسبه گشتاور
function Te=TORQUE(In)
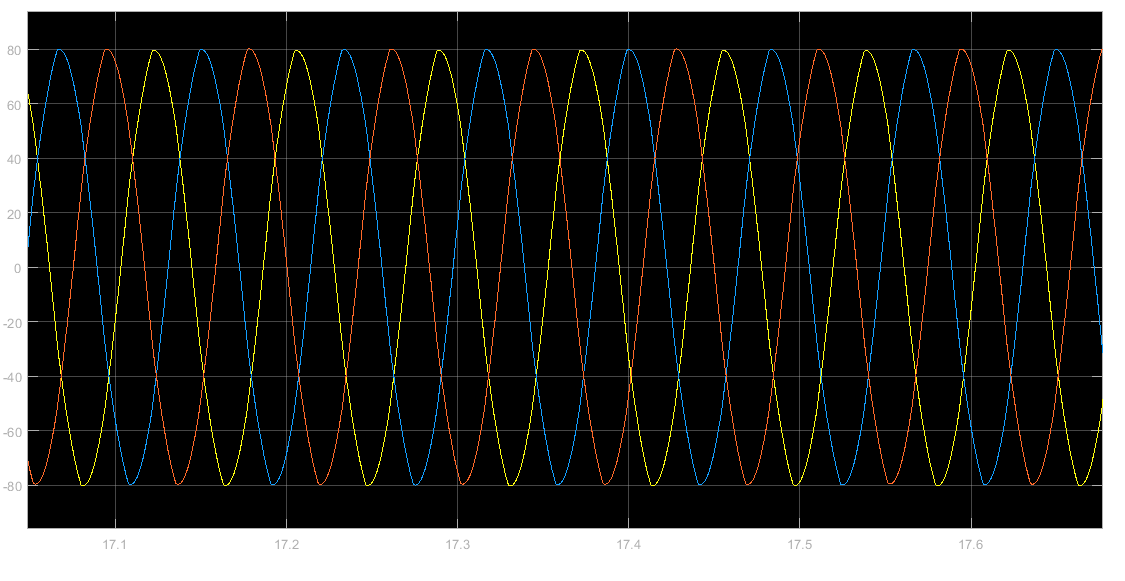
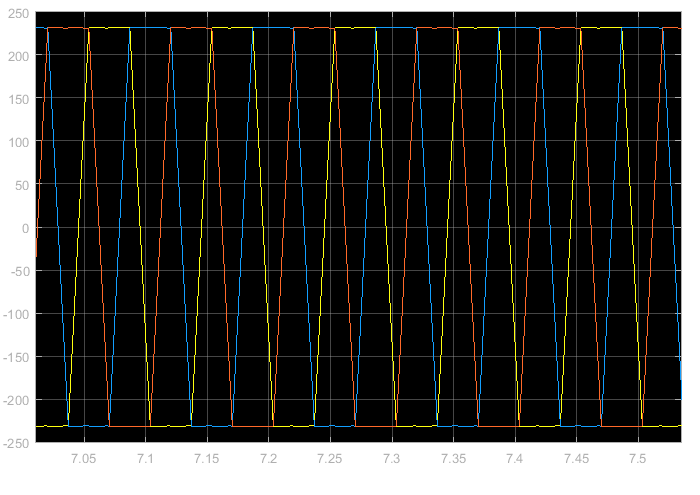
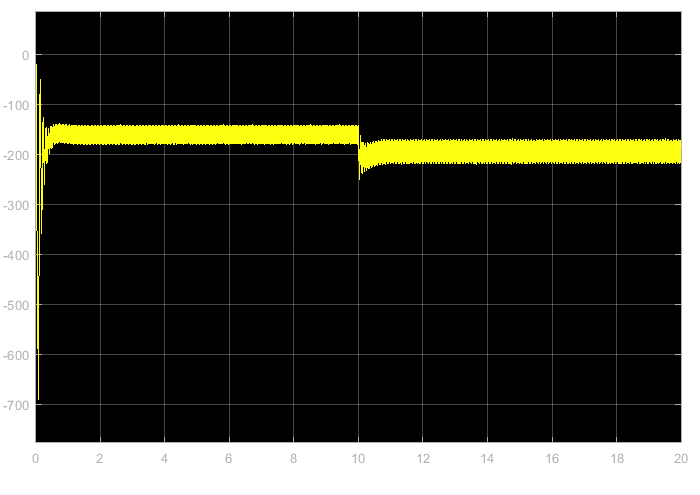
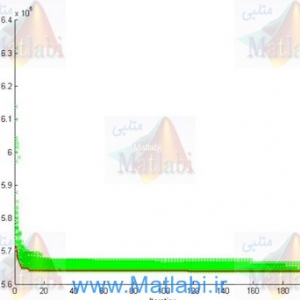
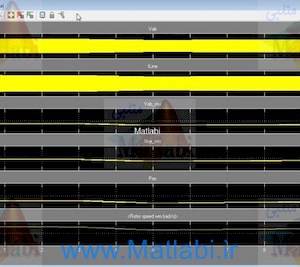
شکل های خروجی شبیه سازی مقاله

مقدار سرعت مرجع و سرعت موتور

نحوه تغییر ولتاژ های فاز موتور
جریان فازهای موتور
نیروی ضد محرکه سه فاز
گشتاور خروجی موتور
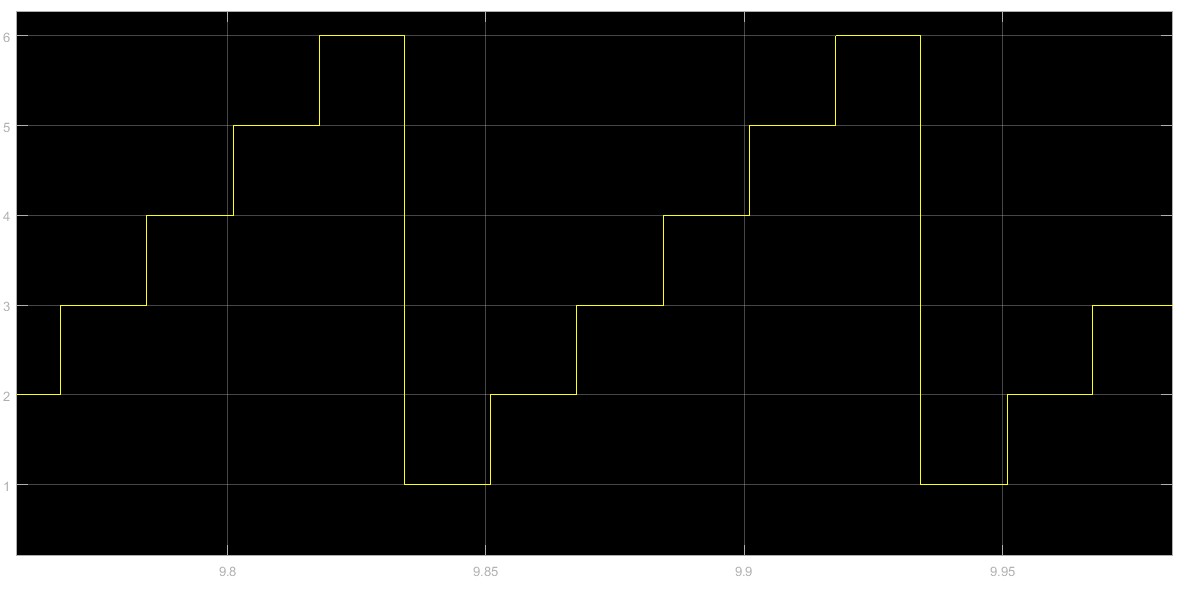
نحوه انتقال متوالی فاز
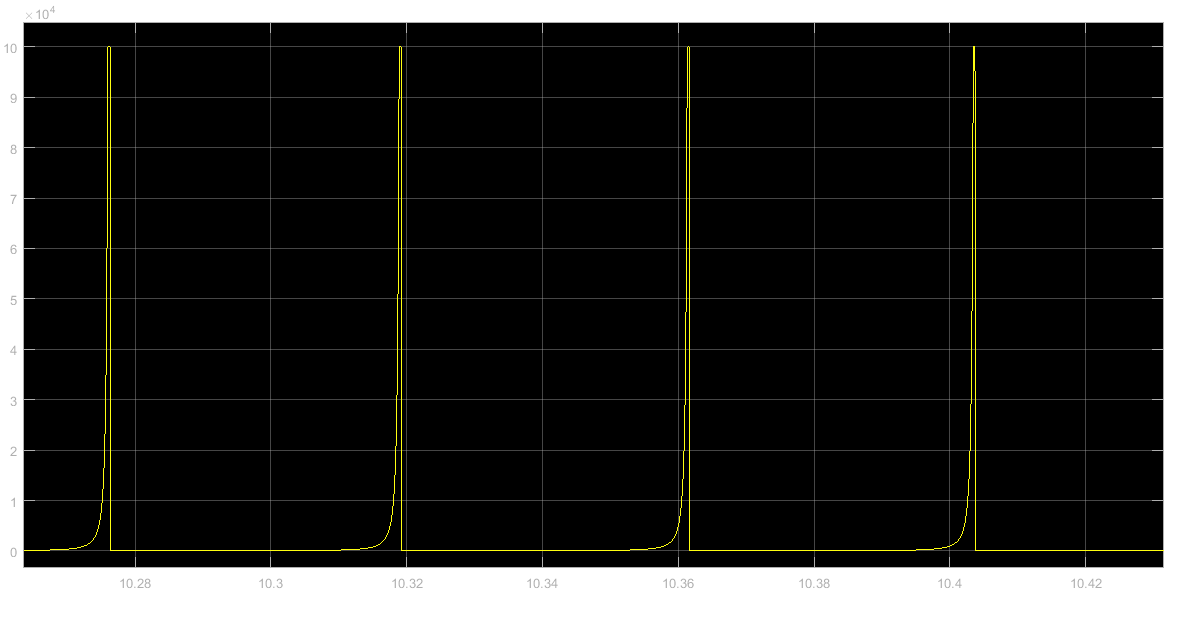
نرخ تغییرات تابع Gx
کلید واژه:
BLDC motor, sensorless control strategy, flux linkage function, commutation error
شبیه سازی مقاله
Adaptive Commutation Error Compensation Strategy Based on a Flux Linkage Function for Sensorless Brushless DC Motor Drives in a Wide Speed Range
توسط کارشناسان سایت متلبی تهیه شده است و به تعداد محدودی قابل فروش می باشد.
سفارش انجام پروژه مشابه
درصورتیکه این محصول دقیقا مطابق خواسته شما نمی باشد،. با کلیک بر روی کلید زیر پروژه دلخواه خود را سفارش دهید.


دیدگاهها
هیچ دیدگاهی برای این محصول نوشته نشده است.