توضیحات
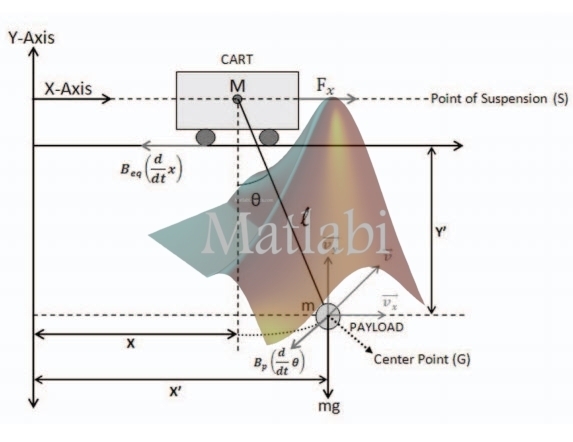
Active Sway Control of a Single Pendulum Gantry Crane System using Output-Delayed Feedback Control Technique
این محصول پروژه کنترل مدرن است.
توجه کنید از سیستم کنترلی مقاله برای بدست آوردن موارد زیر استفاده شده:
قطری سازی، کنترل پذیری ، رویت پذیری ، کنترلر فیدبک حالت(روش بس و گیورا) ، طراحی رویت گر حالت
کلید واژه : قطری سازی، کنترل پذیری ، رویت پذیری ، کنترلر فیدبک حالت، رویت گر , پروژه متلب, پروژه matlab , شبیه سازی با متلب
Anti-Sway control, Output-delayed feedback control (ODFC), LQR Control, Single pendulum Gantry Crane (SPGC)
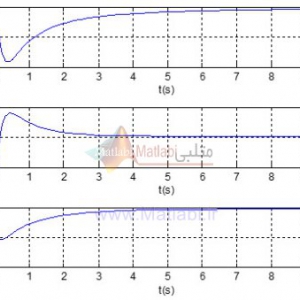
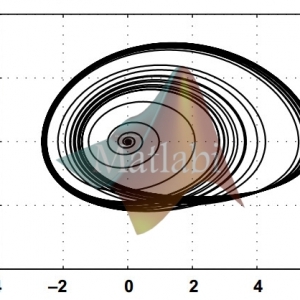
شبیه سازی مبحث کنترل مدرن با سیستم مقاله
Active Sway Control of a Single Pendulum Gantry Crane System using Output-Delayed Feedback Control Technique
به تعداد محدودی قابل فروش می باشد.
سفارش انجام پروژه مشابه
درصورتیکه این محصول دقیقا مطابق خواسته شما نمی باشد،.
با کلیک بر روی کلید زیر پروژه دلخواه خود را سفارش دهید.