
توضیحات
Active sensor fault tolerant output feedback tracking control for wind turbine systems viaT–S model
کنترل ردیابی فیدبک تحمل خطای سنسور فعال برای سیستم های توربین بادی از طریق مدل T-S
شبیه سازی با روش رانگ کوتا (Runge-Kutta) انجام شده و عدم قطعیت نیز به ان اضافه شده.
شبیه سازی در محیط ام فایل متلب انجام شده است.
دارای گزارش ورد 11 صفحه ای است.
توضیحات پروژه
بعد از خرید پروژه سه پوشه دریافت می کنید, که شامل پوشه پیپر, ریپورت و سیمولیشن هست.
پوشه پیپر:
- مقاله اصلی (شبیه سازی)
- مقاله ای که مقادیر ثابت پارامترها از آن گرفته شده است
- مقاله ای که داده های سرعت باد از آن گرفته شده است
توضیحات پوشه simulation
شبیه سازی ها در این پوشه قرار داده شده اند. در این پوشه، دو پوشه دیگر مشاهده میکنید:
- پوشه 1: شبیه سازی بدون عدم قطعیت
- پوشه 2: شبیه سازی با عدم قطعیت
در اینجا فایلهای شبیه سازی را مختصر توضیح میدهیم اما برای تهیه فایل کامل پروژه متلب باید این محصول را خریداری نمایید.
بطور نمونه توضیحات فایل main را بدون کم و کاست در اینجا قرار داده ایم:
فایل main
شبیه سازی را با این فایل اجرا نمایید. پس از ظاهر شدن دو گزینه حتما Change Folder را انتخاب نمایید.
خط 12: نصب حل گر sedumi جهت استفاده در yalmip
خط 15: زمان شبیه سازی (گام شبیه سازی 0.05 در نظر گرفته شده است). این گام را افزایش ندهید.
خط 18: خواندن داده های موجود در فایل CpData که شامل مقادیر Cp بر اساس تابعی از beta و lambda است و از شکل 5 مقاله گرفته شده است.
خط 21: خواندن داده های باد.
خط 24: خواندن داده های مربوط به فالت fs اندازه گیری شده (در قسمت تخمین فالت، باید این فالت به درستی تخمین زده شود که خواهیم دید این گونه میشود).
خط 28: فراخوانی فایل inputs که ورودی ها در آن قرار داده شده اند (این فایل توضیح داده نمی شود).
خط 35: حل معادلات سیستم به کمک روش رانگ کوتای مرتبه 4 (محتویات این روش در فایل ode4 قرار دارد و این فایل نیز توضیح داده نمی شود).
خطوط 37 تا انتها: رسم نمودارها.
فایل CpInterpolation
در این فایل با دریافت 2 ورودی lambda و beta مقدار Cp متناظر با این دو داده، از طریق میان یابی درجه 2 به دست می آید.
فایل systemMatrices
در این فایل ماتریسهای سیستم طبق معادلات مقاله قرار داده شده اند.
فایل fuzzyMembership
توابع عضویت فازی طبق توضیحات مقاله در این فایل قرار داده شده اند. خروجی این فایل h است. در قسمت نتایج خواهیم دید که جمع h ها در هر لحظه برابر 1 است.
فایل fuzzy_ppio
این فایل شامل معادلات رویتگر فازی است و نقش تخمین فالت و نیز متغیرهای حالت مجهول سیستم را دارد.
فایل TSDOFC
شامل معادلات کنترلر سیستم حلقه بسته است.
فایل solveSystemEquations
این فایل به فراخوانی فایلهای کنترلر و رویتگر میپردازد. سپس معادلات توسط روش رانگ کوتای مرتبه 4 حل میگردند (در فایل main).
نتایج شبیه سازی با متلب
نتایج شبیه سازی بدون عدم قطعیت
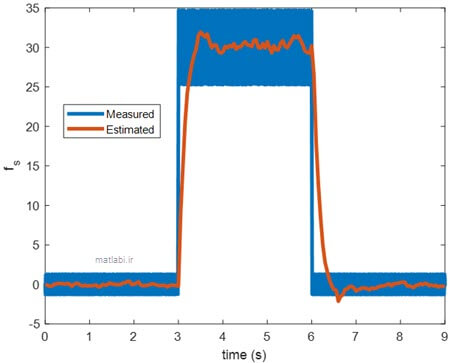
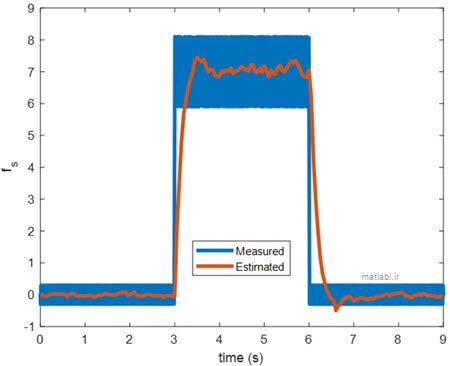
در شکل زیر، نمودار قرمز تخمین فالت (نمودار آبی) است. ملاحظه میشود که این تخمین به خوبی صورت گرفته است.

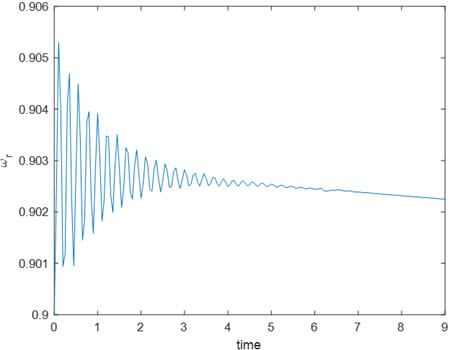
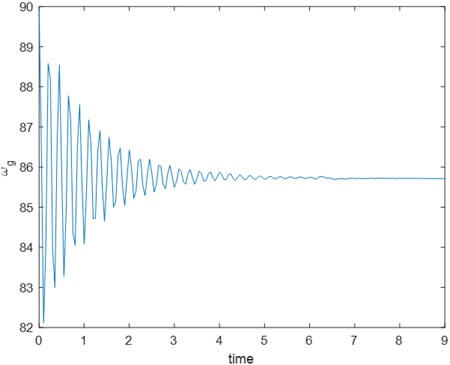
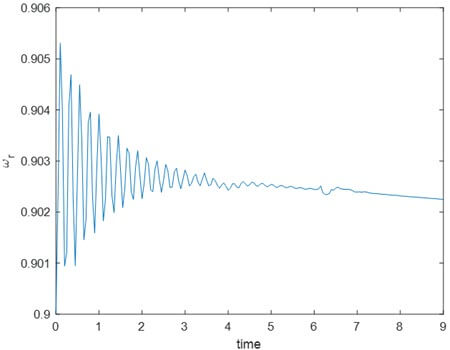
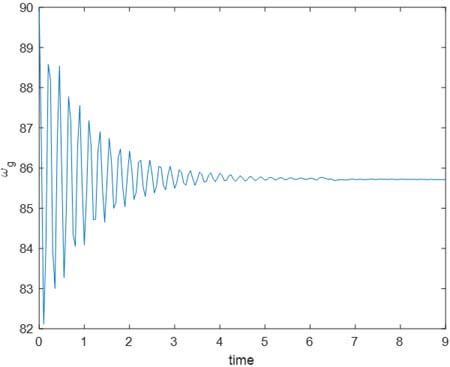
نمودارهای omega_r و omega_g در انتها آورده شده اند. ملاحظه میشود بازه تغییرات در حدود مقاله است. البته اختلافاتی هم به دلیل در دسترس نبودن تمامی داده ها به چشم میخورد ولی در کل پاسخ های مناسبی دریافت شده است. در حدود بازه 3 تا 6 ثانیه که فالت از صفر به 7 میرسد ملاحظه میشود که تغییراتی در این نمودارها پدید می آید و این تغییرات در نمودارهای مقاله هم دیده میشود. برای بهتر دیده شدن این پدیده یک بار دیگر شبیه سازی در حضور فالت قوی تر انجام میشود تا این موضوع روشن تر گردد. در صورتی که زمان نهایی را افزایش دهید میتوانید این موضوع را واضح تر مشاهده کنید.
نمودار Pcap نیز در ادامه آورده میشود:

نمودار توابع عضویت فازی نیز مشاهده میشوند. جمع این پارامترها با نمودار سبز رنگ نشان داده شده است که همواره برابر 1 است.

حال شبیه سازی را با فالت قوی تر (30 به جای 7) تکرار میکنیم. ملاحظه میشود فالت به خوبی تخمین زده شده است و تغییرات در دو نمودار بعدی در بازه 3 تا 6 ثانیه به وضوح دیده میشود. در حضور این فالت قوی نیز سیستم به خوبی ریکاوری شده است.

نتایج شبیه سازی با عدم قطعیت
حال به توضیح پوشه شماره 2 می پردازیم. تمام موارد مانند پوشه 1 است و فقط در خط 111 فایل TSDOFC عدم قطعیت پارامتری به اندازه 10 درصد قدر مطلق متغیرهای حالت کنترلی به آن اضافه شده است. همچنین عدم قطعیت غیرپارامتری به صورت عدد تصادفی در بازه منفی یک دهم تا یک دهم نیز اضافه گردیده است. نتایج در ادامه آورده شده است. ملاحظه میشود در حضور عدم قطعیت ها نیز سیستم رفتار مطلوبی دارد. همچنین فالت نیز به خوبی تخمین زده شده است.

کلیدواژه:
Active fault tolerant control, Fault estimation, Tracking control, T–S fuzzy systems, Dynamic output feedback control, Wind turbine control
شبیه سازی
Active sensor fault tolerant output feedback tracking control for wind turbine systems viaT–S model
طبق توضیحات فوق توسط کارشناسان سایت متلبی تهیه شده است و به تعداد محدودی قابل فروش می باشد.
سفارش انجام پروژه مشابه
درصورتیکه این محصول دقیقا مطابق خواسته شما نمی باشد،.
با کلیک بر روی کلید زیر پروژه دلخواه خود را سفارش دهید.






دیدگاهها
هیچ دیدگاهی برای این محصول نوشته نشده است.