توضیحات
A Switching Controller for Uncertain Nonlinear Systems
یک کنترل کننده سوئیچینگ برای سیستم های غیر خطی نامشخص
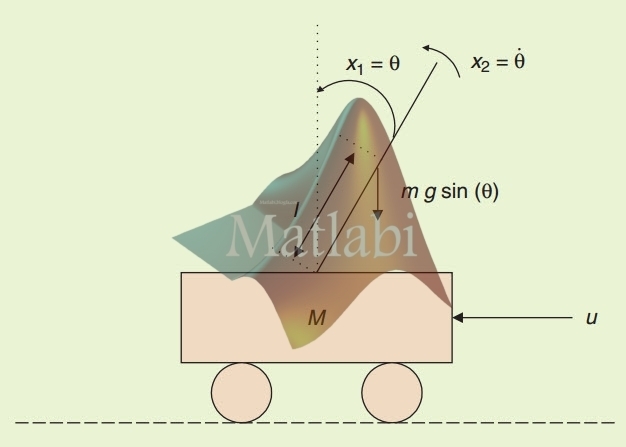
از دو نوع کنترلر سوئیچینگ و کنترلر خطی برای کنترل سیستم پاندول معکوس
در این مقاله از دو نوع کنترلر سوئیچینگ و کنترلر خطی برای کنترل سیستم پاندول معکوس استفاده شده است. شبیه سازی با اجرای برنامه main اجرا خواهد شد. ساختار برنامه main به صورت زیر می باشد:
….
در خط 7 برنامه با تغییر مقدار m , M می توان شکلهای دیگر مقاله را نیز بدست آورد. در هر بار اجرا 2 شکل بدست می آید که یکی حاصل کنترلر سوئیچینگ و دیگر حاصل کنترلر خطی می باشد.
برنامه کنترلر سوئیچینگ به صورت زیر می باشد:
function [x,x_h,T]=switching_controller(x0)
global m M r
…
در هر کدام از کنترلرهای ارائه شده در مقاله از یک سیستم فازی برای تقریب مدل سیستم و بدست آوردن حالتهای پاندول استفاده شده است.
برنامه فازی برای تقریب مدل سیستم به صورت زیر می باشد:
function x_fuzzy_new=fuzzy_model(x_fuzzy,u,dt)
global m M
…
به ازائ m=2;M=8;r=8; شکلهای 3و 4 به صورت زیر بدست می آیند:
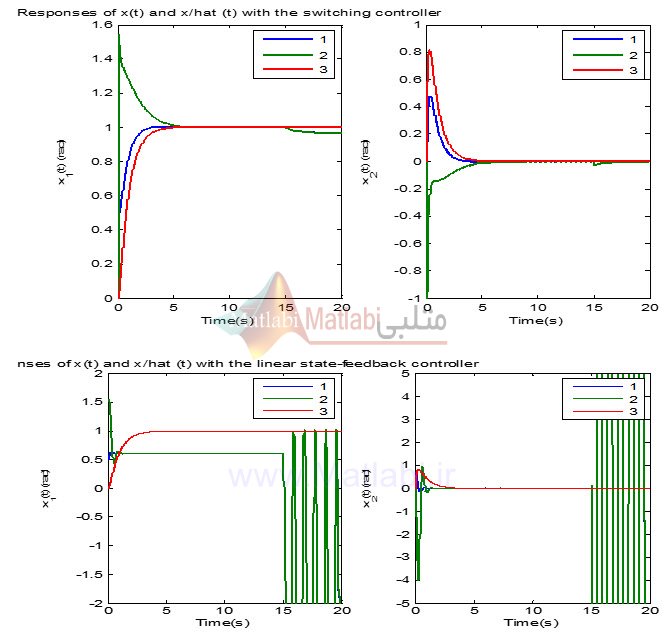
توجه: ممکن است مقداری اختلاف بین نتایج شبیه سازی و نتایج مقاله ملاحظه شود که دلیل آن دقیق نبودن مقادیر پارامترهای ارائه شده در مقاله می باشد.
با تغییر پارامترهای کنترلر خطی و سوئیچینگ می توان به جوابهای نزدیکتری به مقاله دست پیدا کرد.
, پروژه متلب, پروژه matlab , شبیه سازی با متلب
شبیه سازی
A Switching Controller for Uncertain Nonlinear Systems
به تعداد محدودی قابل فروش می باشد.
سفارش انجام پروژه مشابه
درصورتیکه این محصول دقیقا مطابق خواسته شما نمی باشد،.
با کلیک بر روی کلید زیر پروژه دلخواه خود را سفارش دهید.