توضیحات
A Simpler Approach to the Modelling of Permanent Magnet Brushless DC Machine in MATLAB Environment
یک روش ساده برای مدلسازی ماشین DC آهنربای دائم بدون جاروبک در محیط متلب
شبیه سازی در محیط سیمولینک متلب انجام شده است.
دارای گزارش 22 صفحه ای در قالب ورد است.
بخشی از گزارش:
موتورهای BLDC اصطلاحا (Brushless DC Motor) نوعی از موتورهای سنکرون هستند.
این موضوع به این معنی است که میدان مغناطیسی در روتور و استاتور با یک فرکانس ایجاد می شوند.
انواع موتور DC بدون جاروبک دارای لغزش به آن مفهومی که در موتورهای القایی وجود دارد نمیباشند.
موتورهای BLDC در انواع تک فاز، دو فاز و سه فاز وجود دارند.
مطابق نوع آن، استاتور دارای همان تعداد سیم پیچ میباشد.
علاوه بر این موتورهای سه فاز بیشترین رواج و مصرف را در بین انواع دیگر دارند.
که در اینجا به نوع سه فاز میپردازیم.
استاتور موتور DC بدون جاروبک از ورقه های فولادی به هم پرچ شده با سیم پیچی که در شیارهای آن قرار گرفته به صورت شکل شماره (۱) ساخته شده است.استاتور همانند استاتور یک موتور القایی است.
اما سیمپیچها به روشی متفاوت در استاتور توزیع شده اند.
بیشتر موتورهای BLDC دارای سه سیمپیچ در استاتور با اتصال ستاره هستند.
هر کدام از این سیمپیچیها از تعدادی پیچک به هم متصل تشکیل شده اند.
هر کدام از این سیم پیچیها در محیط استاتور توزیع شدهاند. و تعداد زوجی از قطبها را تشکیل داده اند.
دو نوع مختلف از سیمپیچی استاتور وجود دارد: موتورهای ذوزنقه ای و موتورهای سینوسی.
این تفکیک بر اساس اتصالات داخلی پیچکهای یک سیم پیچ که انواع مختلفی از نیروی ضد محرکه (EMF) را ایجاد می کنند شکل گرفته است.
جهت دیدن ادامه گزارش باید این محصول خریداری شود.
شبیه سازی مقاله
برای قدرت مکانیکی ماکزیمم باید سرعت ، جریان و E هر فاز معلوم باشد و همچنین آمپر / گشتاور ، ماکزیمم نیز مشخص باشد .
در موتورهای (BLDC) موقعیت فیدبک برای روتور از طریق روش هال ، وسایل نوری ، کدگذاری و …. انجام می شود .
برای نگه داشتن زاویه خاص بین V,E (E فازی با موقعیت روتور و V معین ) با عکس کردن حرکت موتور فراهم می شود.
فرض می کنیم wL<<R وقتیکه I با V,E همفاز است بنابراین می توان مدار را آنالیز کرد،ابتدا فرض می کنیم I,E همفازند و قدرت مکانیکی خروجی بدون تلفات آهن و اصحطکاک و مزاحمت باد محاسبه می شود.
4-1 منحنی گشتاور – سرعت :
فرض می کنیم WL<<R است و فیدبک موقعیت E,V را در هم فازی نگه می دارد . معادله ولتاژ می تواند یک معادله جبری ساده باشد :
(7-1) V=E+RI
با جابه جاکردن نسبت می توانیم بدست آوریم :
(8-1)و(9-1)
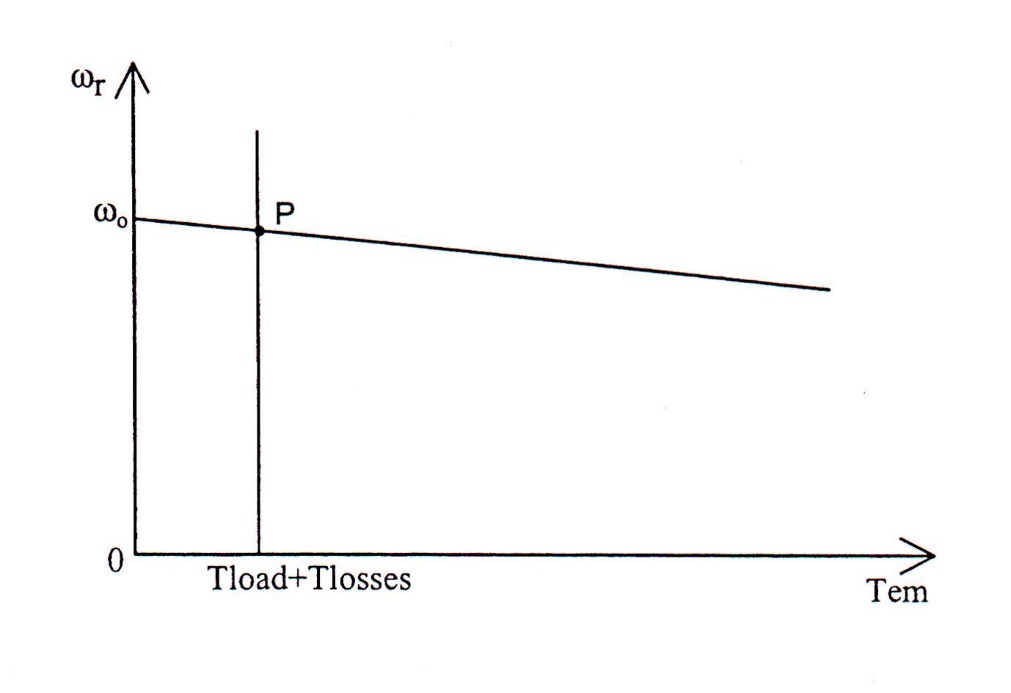
شکل (7-1) : منحنی گشتاور سرعت موتور (BLDC) با ولتاژ ثابت
5-1 بازده :
همان طورکه می دانیم تعریف بازده نسبت توان خروجی به توان ورودی می باشد .
…
که در اینجا می باشد که تلفات مسی معروف است ، که R مقاومت سیم پیچی را در بر می گیرد . همان طور که در جدول(1-1) نمایان است موتور BLDC بسیار بهتر از موتور AC سنکرون است . و موتور BLDC کمی پیچیدگی در ساختار خود دارد ،زیرا از عناصر هال یا ICs که بر روی استاتور سوار شده استفاده می شود .
جدول (1-1) مقایسه موتور AC سنکرون و موتور BLDC برای هارد دیسک 8 اینچی
| موتور BLDC | موتورAC سنکرون | |
| جریان مستقیم،ولتاژکم (12-24ولت) | نیاز به وارونگر (معکوس کننده ) دارد | منبع تغذیه |
| مستقل از فرکانس | سرعت بستگی به فرکانس دارد | تنظیم سرعت |
| قابل تنظیم است | قابل تنظیم نیست | تنظیم زمان راه اندازی |
| کم | زیاد | افزایش دما |
| زیاد (40-50 درصد) | کم ( تقریبا 30 درصد) | بازده |
| کنترل فیربک دار | ثابت | کنترل سرعت |
| کمی پیچیده | ساده | ساختار |
| بدون مدار کنترلی و با استفاده از ICs گران می شود | کم | هزینه |
| خوب | بد | نسبت حجم صدا خروجی |
جدول(3-1)زیر مزایا و معایب این نوع موتورها را مقایسه می کند :
| موتورهای عادی و رایج | موتورهای بدون جاروبک | |
| ساختمان مکانیکی | میدان مغناطیسی استاتور | میدان مغناطیسی، مانند : موتورهای سنکرون بر روی موتور |
| مشخصات برجسته | پاسخ سریع و قابیلت اطمینان کنترل بالا | عمر زیاد و سادگی تعمیرات و نگهداری |
| روش سیم بندی | اتصال حلقوی ساده ترین اتصال مثلث | اتصال ستاره معمولی ترین اتصال ستاره سه فاز یا چند فاز |
| روش ارتباط و کلید زنی | تماس مکانیکی بین جاروبک و کموتاتور | عنصر هال ، رمز کننده های نوری و غیره |
| روش معکوس کردن جهت حرکت | معکوس کردن ولتاژ ورودی | به وسیله مدارهای منطقی و دیجیتالی خاص |
| روش آشکار سازی موقعیت روتور | به صورت اتومکاتیک توسط جاروبک قابل آشکار شده است | عنصر هال و … |
جدول(3-1): مزایا و معایب موتورهای عادی و موتورهای بدون جاروبک.
زمانیکه موتورهای الکتریکی مورد بررسی قرار می گیرند ، اهمیت سیم پیچهای کموتاسیون را نباید از یاد برد . کموتاسیون فرایندی است که طی آن جریانDC تبدیل به جریان AC شده و سبب توزیع صحیح جریان در سیم پیچ های آرمیچر می شود .
در موتورهای DC بدون جاروبک عمل کموتاسیون توسط نیمه هادیهایی نظیر ترانزیستور انجام می گیرد ولی در موتورهای DC متداول عمل کموتاسیون توسط کموتاتور و جاروبکها انجام می گیرد .
3-3 اختلاف در کموتاسیون :
در شکل (1-3)عملکرد جاروبک و تیغه های مسی در یک موتورDCرا که توسط دو کلید مکانیکی یا دو ترانزیسور جایگزین شده است .
یک قسمت ازکموتاتور مثلا A را در سه حالت در نظر بگیرید :
الف : تماس با جاروبک مثبت
ب : تماس با جاروبک منفی
ج : با هیچ یک از جاروبک ها در تماس نباشد .
-
- اجزا اصلی یک موتور DC بدون جاروبک :
الف) روتور مغناطیسی دائم
ب) سیم پیچها
ج) عنصر اثر هال
چگونگی تعیین موقعیت روتور در موتورهای DC بدون جاروبک
روشهای زیر برای کنترل وضعیت روتور در یک موتور بدون جاروبک به کار می رود :
1 – روش هال
2 – دیودهای نورانی و ترانزیستورهای نوری
3 – سلف های حساس به تغییرات اندوکتانس
2-4 کنترل وضعیت با استفاده از اثر هال :
انواع سنسور وضعیت :
1 – مغناطیسی
2 – وسایل نوری
3 – اثر هال
4 – کلیدزنی
از این روش ها ، روش هال به طور وسیع مورد استفاده قرار می گیرد و ما در اینجا این روش را مورد بررسی قرار می دهیم .
1-2-4اثر هال و عناصر هال :
مقدار نیروی محرکه VH که ولتاژ هال نامیده می شود ، از رابطه زیر به دست می آید :
VH=(1/d)B.I.c.RH
در این رابطه RH ثابت هال می باشد (m^3c^-1) و IC جریان الکتریکی برحسب آمپر B , (A) چگالی شار مغناطیسی بر حسب تسلا d , (T) ضخامت قطعه نیمه هادی برحسب متر (m) است .
این پدیده برای اولین بار در سال 1878 توسط آقای هال (B.H.Hall) هنگام آزمایش روی تیغه فلزی کشف شد و اثر هال نام گرفت . اثر هال در بعضی از فلزات ترکیبی مخصوص یا نیمه هادی قوی می باشد .
عناصر نیمه هادی را برای آشکار کردن میدان مغناطیسی بکار می برند ، عناصر هال یا ژنراتورهای هال می نامند . VH=(1/d)B.I.c.RH
2-2-4 اثر هال :
اثر هال در مورد موتورهای DC بدون جاروبک مدرن از نوع In Sbn (اندیم و آنتیموان) به طور گسترده استفاده می شود . همچنین Ga As (کالیم-آرسنید) نیز بکار می رود .
3-2-4 اصول تعیین وضعیت با استفاده از عناصر هال :
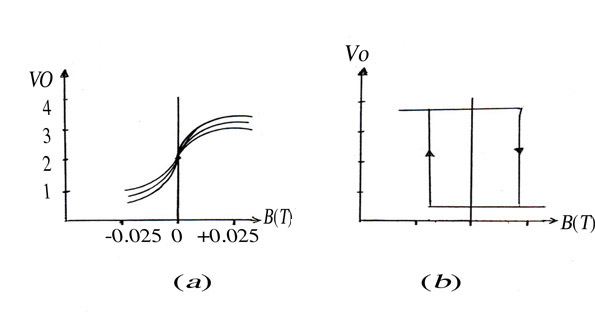
شکل (-a1-4) مدار یک عنصر هال را نشان می دهد .
وقتی که جریان Ic که جریان کنترلی یا جریان بایاس نامیده می شود ، از ترمینال 3 به 4 جاری شده و عنصر هال در معرض میدان مغناطیسی عمود بر سطح آن قرار گیرد ، ولتاژ VH در دو سر ترمینالهای 1و2 ظاهر می شود .
اگر ترمینال 4 به عنوان نقطه مرجع در نظر گرفته شود .
با فرض این که R3=R4 , R1=R2 باشد ، آنگاه ولتاژ ترمینالهای 1و2 نسبت به این ترمینال به ترتیب (-VH/2) , (VH/2) خواهد بود .
بنابراین چنانچه یک عنصر هال در نزدیکی میدان مغناطیسی روتور قرار گیرد می تواند قطب و شدت میدان مغناطیسی را توسط ولتاژهای VH2,VH1 آشکار سازد.
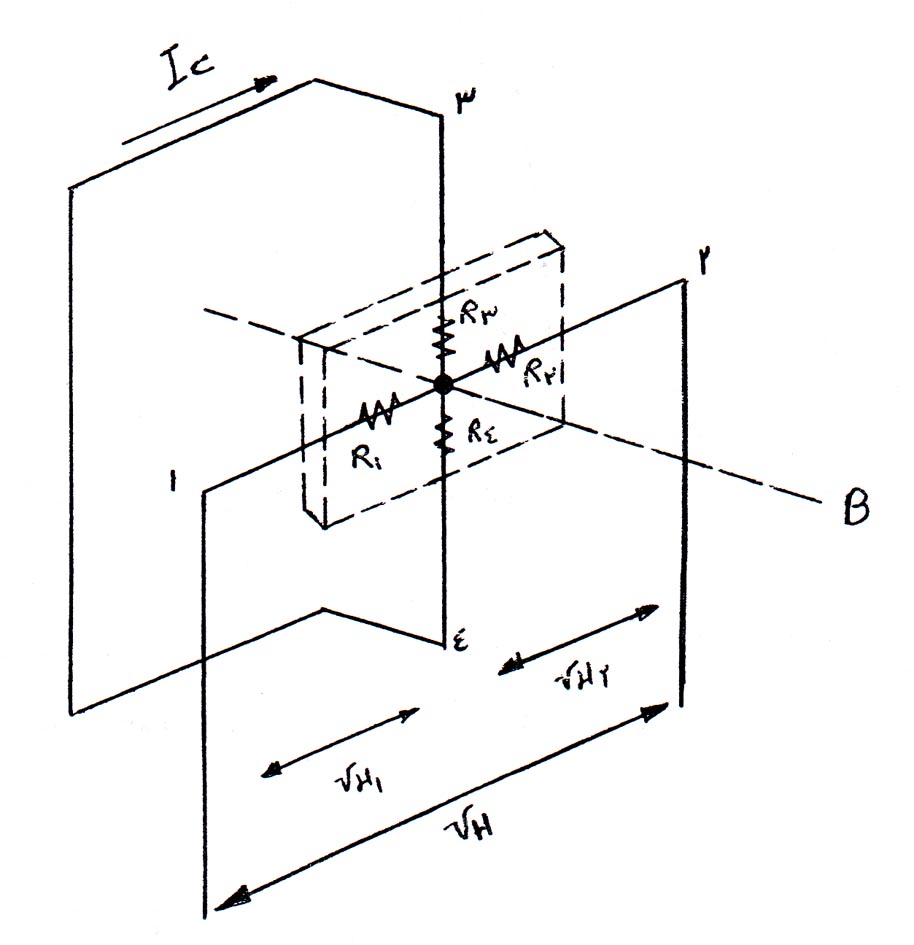
شکل (-a1-4) مدارمعادل یک عنصر هال
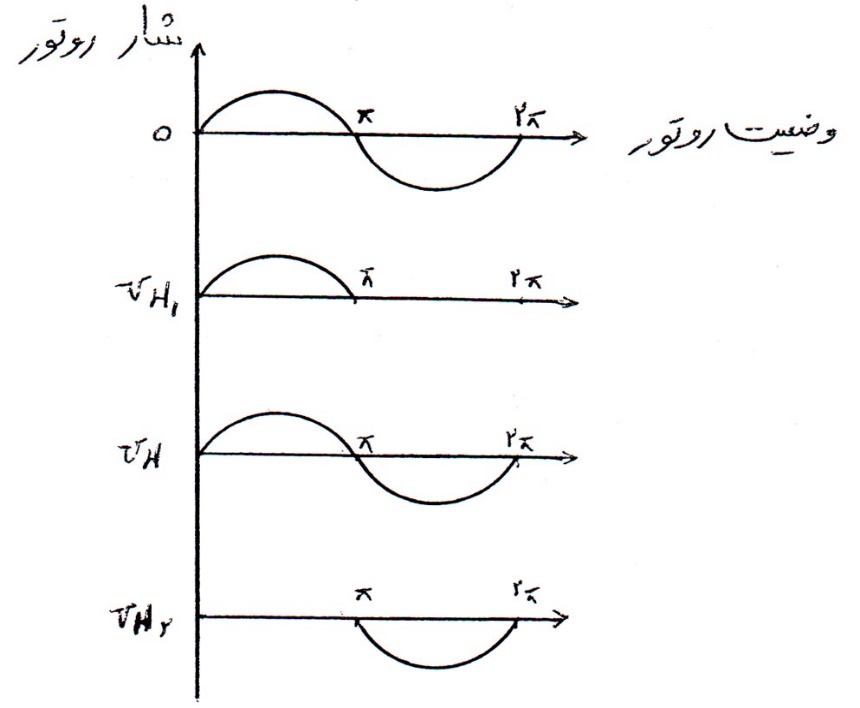
شکل (-b1-4) شکل موج خروجی عناصر هال
3-4 روشهای عملی تعیین موقعیت :
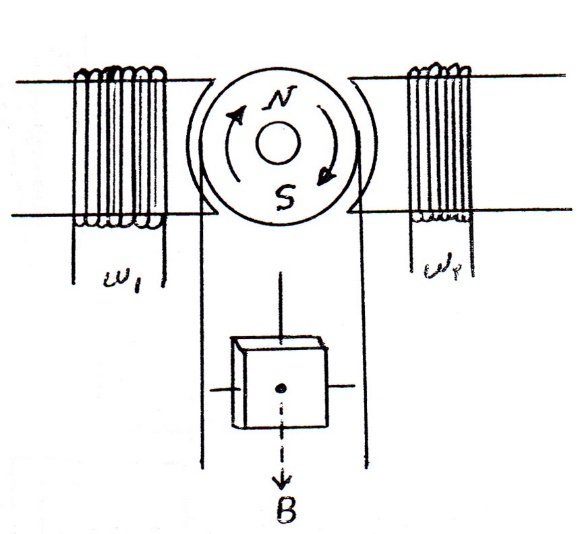
شکل(2-4) ساده ترین موتور DC بدون جاروبک را نشان می دهد که از یک عنصر هال برای تعیین وضعیت مطابق شکل (a-3-4) استفاده کرده است.
سیگنالهای خروجی از عنصر هال برای راه اندازی ترانزیستورهای TR2,TR1 استفاده می شوند و این ترانزیستورها نیز جریان سیم پیچی استاتورهای W2,W1 را کنترل کند .
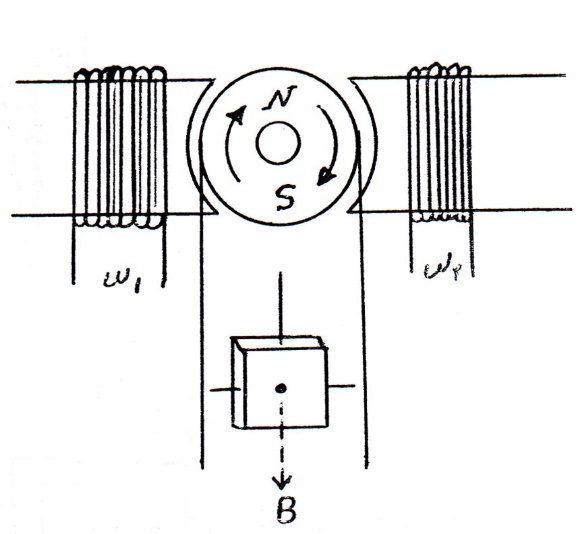
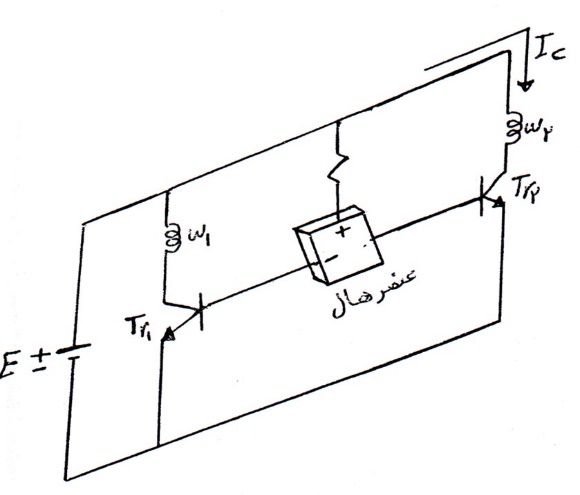
شکل ( 2-4) اصول کار موتور DC بدون جاروبک با استفاده از عنصر هال
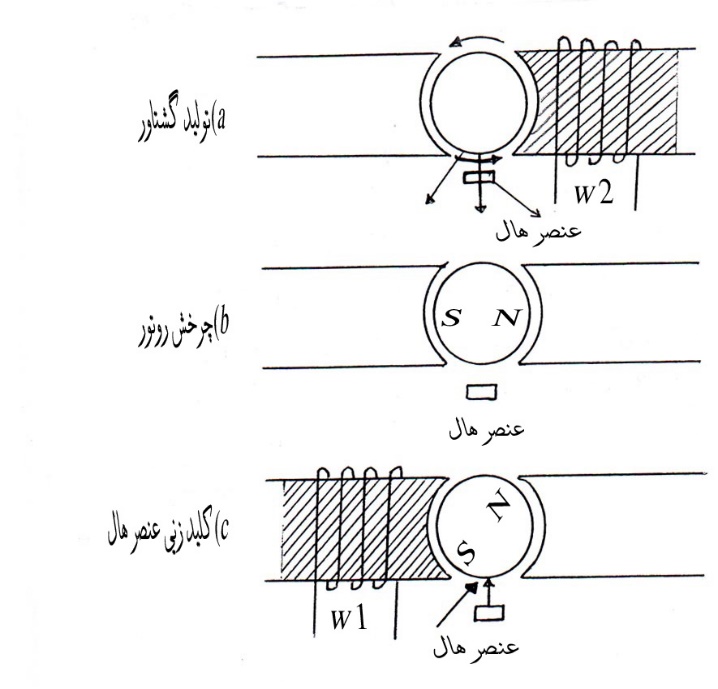
شکل های (3-4) حالتهای روتور را در هنگام چرخش نشان می دهد
(a در این وضعیت عنصر هال قطب N آهنربا روتور را آشکار می سازد و سیم پیچ W2 طوری تحریک می شود که قطب s در آن بوجود می آید که نهایتا باعث چرخش روتور در جهت عکس عقربه های ساعت می شود .
(b در این وضعیت چون میدان مغناطیسی به عنصر اعمال نمی شود هر دو ترانزیستور tr1,tr2 خاموش می باشد و جریان از سیم پیچ های w1,w2 عبور نمی کند . روتور نیز به لحاظ اینرسی که دارد به چرخش خود ادامه می دهد .
(c در وضعیت C مطابق شکل بالا عنصرهای قطب S آهن ربا را آشکار می سازد و مطابق شکل حالت (A) عمل می کند .
4-4IC های هال :
برای تقویت سیگنالهای خروجی از عناصر هال نیاز به یک یا چند ترانزیستور می باشد امروزه عنصرها و مدارات الکترونیکی وابسته اش را روی یک تراشه (CHI) سوار می کند و آن را IC می نامند .
سیگنال خروجی از عناصر هال ابتدا توسط تقویت کننده عملیاتی تقویت می شود و سپس در طبقه خروجی عملیات دیگری روی آن انجام می گیرد .
سیگنال خروجی از IC هال به ترانزیستور قدرت اعمال می شود تا جریان سیم پیج توسط آن کنترل شود .
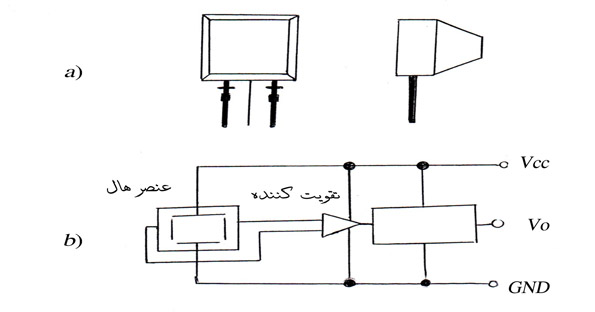
a)) شمای خارجی (b) بلوک دیاگرام هال
شکل (4-4) : انواع Ic هال (a نوع خطی (b نول کلیدی
شکل (4-4) دو نو ع IC هال وجود دارد نوع خطی و نوع کلیدی.
انتخاب این دو نوع IC بستگی به ساختمان آن دارد .
چگونگی تغییر جهت حرکت موتور به سادگی با معکوس کردن ولتاژ تغذیه امکان پذیر است .
جریان Ia:

Emf برگشتی یا EA:
گشتار الکتریکی:
سرعت موتور Wm:
کلید واژه:
brushless DC, modelling, power system library, MATLAB/Simulink, reliability , تئوری جامع ماشین های الکتریکی, Modelling of Permanent Magnet Brushless DC Machine, سیمولینک متلب, شبیه سازی مقاله BLDC, شبیه سازی مقاله BLDC در matlab, شبیه سازی مقاله BLDC در متلب, شبیه سازی مقاله مدلسازی ماشین DC آهنربای دائم بدون جاروبک, مدلسازی ماشین DC آهنربای دائم بدون جاروبک, موتور DC بدون جاروبک
شبیه سازی مقاله
A Simpler Approach to the Modelling of Permanent Magnet Brushless DC Machine in MATLAB Environment
توسط کارشناسان سایت متلبی تهیه شده است و به تعداد محدودی قابل فروش می باشد.
سفارش انجام پروژه مشابه
درصورتیکه این محصول دقیقا مطابق خواسته شما نمی باشد،. با کلیک بر روی کلید زیر پروژه دلخواه خود را سفارش دهید.


دیدگاهها
هیچ دیدگاهی برای این محصول نوشته نشده است.