توضیحات
A Simple Adaptive Control Approach for Trajectory Tracking of Electrically Driven Nonholonomic Mobile Robots
ترجمه فارسی موضوع مقاله: روش کنترل تطبیقی ساده برای ردیابی مسیر ربات غیر هولونومیک
کنترل تطبیقی برای کنترل مسیر یابی ربات
ساختار کلی شبیه سازی به صورت زیر می باشد که شامل دو بخش مدل سیستم و کنترلر می باشد.
معادلات مدل سیستم همانند معادلات داده شده در روابط 6 الی 8 می باشند که به صورت زیر نوشته شده اند:
td=[(rand-.5);(rand-.5)];
R=0.75;d=0.3;r=0.15;mc=30;mw=1;Ic=15.625;Iw=0.005;Im=0.0025;
d11=5;d22=5;Ra=diag([2.5,2.5]);La=diag([0.048,0.048]);
KE=diag([0.02,0.02]);KT=diag([0.2613,0.2613]);N=diag([62.55,62.55]);
…
بلوک کنترلر از دوبخش مدل مرجع و کنترلر تطبیقی تشکیل شده است. مدل مرجع مسیر مورد نظر ربات را مشخص می کند و کنترلر تطبیقی ورودی مورد نظر جهت پیمودن این مسیر را ایجاد می کند. روابط مربوط به کنترلر مرجع در روابط 9 و بخش شبیه سازی مقاله داده شده است که برنامه آن به صورت زیر می باشد
if t<5
vr=0.25*(1-cos(pi*t/5));
dvr=0.05*pi*sin(pi*t/5);
wr=0;
…
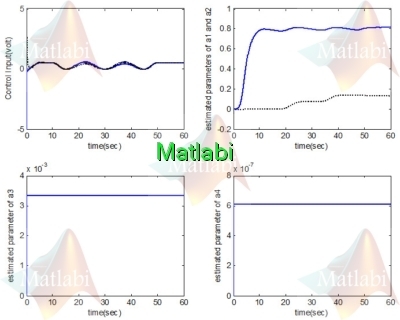
همچنین معادلات مربوط به کنترلر تطبیقی در روابط 10،12،14،15،16،17،19،20،21،22،23،24،25،26 و 27 داده شده و برنامه آن به صورت زیر می باشد:
k1=3;k2=3;k3=2;k4=2;k5=2;delta1=0.001;delta2=0.001;delta3=0.001;
delta4=0.001;gamma1=5;gamma2=5;gamma3=0.00001;gamma4=0.0000000001;
t2=0.01;t3=0.01;
d1=6;d2=5;
…
نتایج شبیه سازی به صورت زیر می باشد:
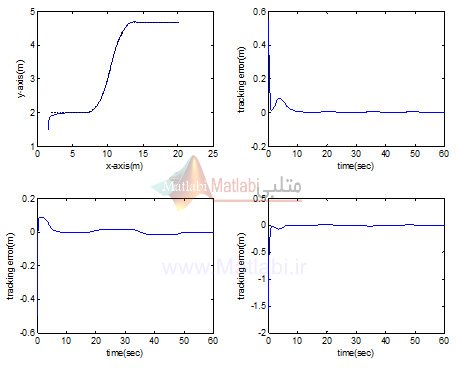
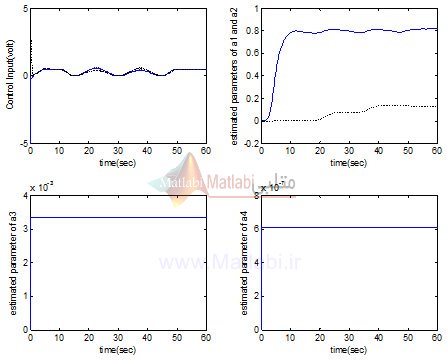
نکته: ممکن است در بعضی از اشکال بین نتایج شبیه سازی و نتایج بدست آمده در مقاله اختلاف اندکی مشاهده شود که دلیل آن پارامترهای ناقص ارائه شده در بخش شبیه سازی مقاله می باشد.
کلید واژه : Actuator dynamics, adaptive control, dynamic surface design, nonholonomic mobile robots, robot dynamics, robot kinematics
شبیه سازی مقاله A Simple Adaptive Control Approach for Trajectory Tracking of Electrically Driven Nonholonomic Mobile Robot
توسط کارشناسان سایت متلبی پیاده سازی گردیده و به تعداد محدودی قابل فروش می باشد.
سفارش انجام پروژه مشابه
درصورتیکه این محصول دقیقا مطابق خواسته شما نمی باشد،. با کلیک بر روی کلید زیر پروژه دلخواه خود را سفارش دهید.






دیدگاهها
هیچ دیدگاهی برای این محصول نوشته نشده است.