
توضیحات
A Robust Backstepping High-Order Sliding Mode Control Strategy for Grid-Connected DG Units with Harmonic/Interharmonic Current Compensation Capability
استراتژی کنترل مود لغزشی مرتبه بالا پسگام مقاوم برای واحدهای توليد پراكنده متصل به شبکه با قابلیت جبران جریان هارمونیک / بین هارمونیک
شبیه سازی در محیط ام فایل متلب انجام شده است.
دارای گزارش ورد 5 صفحه ای است.
دارای ویدیوی 3دقیقه ای است.
توضیحات پروژه
در این پروژه مقاله مرجع شبیه سازی شده و همچنین روش کنترلی دو مقاله زیر نیز در نظر گرفته شده و نتایج ترسیم شده است:
مقاله 2:
Discrete-Time Robust Backstepping Adaptive Control for Nonlinear Time-Varying Systems
مقاله 3
Sliding-Mode Predictive control for a class of uncertain discrete time-varying system
هدف ابتدا شبیه سازی مقاله 1 و سپس اعمال روش کنترلی مقاله 2 و 3 در مقاله 1 و شبیه سازی آن ها و در نهایت مقایسه و بررسی نتایج شبیه سازی ها بصورت جداگانه بوده است.
در اینجا بخش هایی از گزارش ورد جهت رویت شما آورده میشود:
در پوشه simulation پنج کد وجود دارد که به ترتیب زیر می باشند:
main
شبیه سازی با این فایل اجرا می شود. حتما در هنگام اجرا گزینه Change Folder را انتخاب نمایید.
خط 8: فراخوانی فایل شامل ورودی ها
خطوط 11 تا 13: حل معادلات مربوط به مقاله 1
خطوط 16 تا 30: حل معادلات مربوط به مقاله 2
خطوط 33 تا 44: حل معادلات مربوط به مقاله 3
خطوط 47 تا انتها:رسم نمودارها
inputs
ورودی های مساله طبق مقاله در این فایل قرار داده شده اند.
Paper1_equations
این فایل شامل معادلات مربوط به مقاله اول است. به نظر برنامه نویس بهترین روش برای شبیه سازی این سیستم همین مقاله مرجع می باشد. زیرا نویسندگان بر روی این سیستم کار کرده اند و روش ارائه شده نیز منطقی تر و با قابلیت تعقیب انواع ورودی ها است.
paper2_equations
خطوط 8 تا 10: این متغیرها همان f ها در مقاله 1 هستند که در این جا با نام آلفا معرفی شده اند
خطوط 13 تا 15: ماتریس F تعریف شده در مقاله
در این ام فایل که از نام آن پیداست روابط مربوط به کنترلر مقاله دوم آورده شده است که توضیحات آن در گزارش ورد پروژه موجود می باشد.
Paper3_eqiations
این کنترلر توانایی تعقیب را ندارد و فقط سیستم را به مبدا می رساند. به عبارتی دیگر از نوع regulator است ولی بسیار سریع می باشد.
توضیحات این ام فایل نیز در گزارش ورد پروژه موجود می باشد.
موارد مرتبط:
-
Backstepping Based Control of Heave-induced Pressure Deviations in Managed Pressure Drilling
- Seamless Transition of Microgrids Operation from Grid-Connected to Islanded Mode
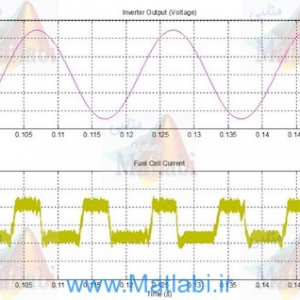
نتایج شبیه سازی با متلب
نتایج بدست آمده از شبیه سازی مطابق با نمودارهای زیر است:
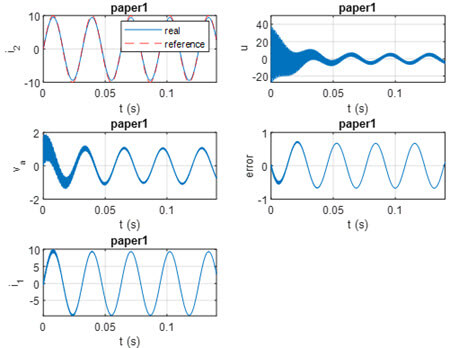
مقاله 1
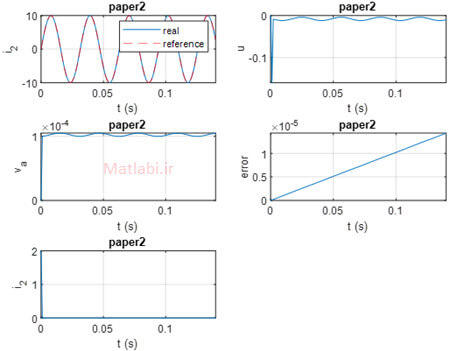
مقاله 2
مقاله 3
نتیجه گیری
از بین کنترلرهای 1 و 2 که توانایی تعقیب دارند، کنترلر 1 بسیار بهتر عمل می کند و توانایی تعقیب انواع ورودی ها را دارد و کار با آن بهتر است.
کنترلر سوم توانایی تعقیب ورودی مرجع را ندارد ولی برای رساندن سیستم به مبدا بسیار عالی است. در واقع این کنترلر یک regulator یا تنظیم کننده است و عملکرد سریعی دارد.
کلیدواژه:
Backstepping control, harmonic compensation, high-order sliding mode differentiator, interharmonic current, nonlinear and unbalanced loads
شبیه سازی
A Robust Backstepping High-Order Sliding Mode Control Strategy for Grid-Connected DG Units with Harmonic/Interharmonic Current Compensation Capability
طبق توضیحات فوق توسط کارشناسان سایت متلبی تهیه شده است و به تعداد محدودی قابل فروش می باشد.
سفارش انجام پروژه مشابه
درصورتیکه این محصول دقیقا مطابق خواسته شما نمی باشد،.
با کلیک بر روی کلید زیر پروژه دلخواه خود را سفارش دهید.


دیدگاهها
هیچ دیدگاهی برای این محصول نوشته نشده است.