توضیحات
A Pole Placing PID Type Controller
طراحی کنترلگر PID به روش جایابی قطب
شبیه سازی در محیط سیمولینک متلب تهیه شده است و با کمک ام فایل متلب اجرا می شود.
دارای گزارش ورد 21 صفحه ای ورد است.
فهرست مطالب گزارش کار به صورت زیر است:
عنوان صفحه
فصل 2- آموزش شبیه سازی مقاله. 3
2-1- چکیده و نکات مهم مقاله. 3
2-1-2- کنترلگر PID با جایابی قطب… 3
2-1-3- انتخاب قطبهای حلقه بسته. 3
3-2- شبیه سازی حالت دوم مثال اول.. 15
عنوان صفحه
شکل 1‑1. روند تنظیم solver سیمولینک. 1
شکل 2‑1. ساختار کنترلی PPPIDt به همراه پیش فیلتر. 3
شکل 2‑2. سیستم مرجع تک ورودی تک خروجی. 4
شکل 2‑3. بلوکهای فایل سیمولینک کنترل. 7
شکل 2‑4. اجزای بلوک شماره 1 برای شبیه سازی مثال اول. 8
شکل 2‑5. تعیین صورت و مخرج تابع تبدیل سیستم مرجع. 9
شکل 2‑6. اجزای بلوک شماره 2 برای شبیه سازی حالت دوم مثال 1. 9
شکل 2‑7. اجزای بلوک شماره 3 برای شبیه سازی مثال دوم. 10
شکل 3‑1. نتایج شبیه سازی مثال 1 و معادل Figure 3 از مقاله. 14
شکل 3‑3. نتایج شبیه سازی مثال 2 و معادل Figure 5 از مقاله. 16
بخشی از گزارش شبیه سازی با متلب
1-1-1- چکیده
در این مقاله به بررسی و ارائه یک روش برای طراحی کنترلگر PID به روش جایابی قطب پرداخته شده است (ppPID مینامیم) که در نهایت منجر به شکلدهی پاسخ و پایداری سیستم حلقه بسته میشود.
همچنین از جهشهای سیگنال کنترلی جلوگیری میکند.
به علاوه در این مقاله یک پیش فیلتر برای ورودی پیشنهاد میشود که صفرهای سیستم و کنترلگر ppPID را حذف کرده و آنها را با صفرهای مناسب دیگر جایگزین کنیم.
این کنترلگر باعث ردیابی مناسب ورودی، دفع اغتشاش و پایداری سیستم حلقه بسته میشود.
فایل های شبیه سازی شامل یک فایل سیمولینک simulation.slx و یک ام فایل main_ppPID.m میباشند.
در فایل سیمولینک در سه حالت مختلف با توجه به مثالهای مقاله عملکرد مدل به همراه کنترلگر شبیه سازی شده است.
با اجرای ام فایل اول، ابتدا مقادیر اولیه شبیه سازی مقدار دهی شده و سپس فایل سیمولینک اجرا شده و در نهایت نتایج شبیه سازی آن در نمودارهای جداگانه رسم میشوند.
لذا برای مشاهده خروجیهای شبیه سازی فقط کافی است ام فایل مذکور را باز و اجرا کرده تا پس از اجرا نتایج را در قالب سه نمودار مستقل مشاهده کنید. (نیازی به اجرای فایل سیمولینک به صورت مستقل نیست.)
نتایج شبیه سازی
پس از اجرای ام فایل مذکور خروجیهای زیر شبیه سازی بدست میآید.
شبیه سازی مثال اول
پس از اجرای شبیه سازی نتیجه زیر برای خروجی سیستم، سیگنال کنترلی و مکان ریشه آن، مشابه Figure 3 از مقاله بدست میآید.
همچنین حد فاز و حد بهره نیز محاسبه شده اند که مشابه مقاله عبارتند از:


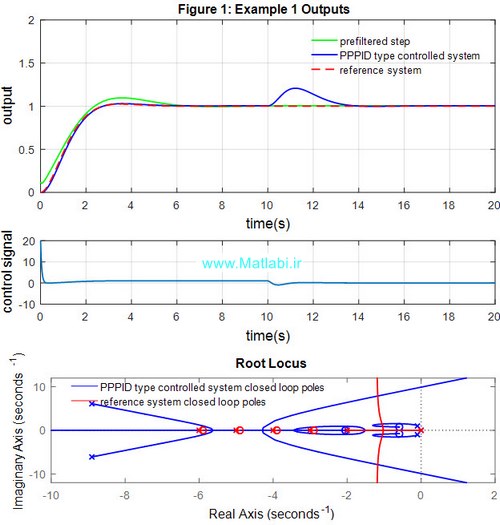
شکل 3‑1. نتایج شبیه سازی مثال 1 و معادل Figure 3 از مقاله.
شبیه سازی حالت دوم مثال اول
در این حالت تنها مدل سیستم انحراف یافته در شبیه سازی جایگزین میگردد که نتایج زیر بدست آمده و عینا مشابه Figure 4 از مقاله میباشد.
مشابه این نتایج کنترلگر تا حد کمی توانسته است در مقابل انحراف مدل مقاومت داشته باشد.

شکل 3‑2. نتایج شبیه سازی حالت دوم مثال 1 برای بررسی مقاوم بودن کنترلگر و معادل Figure 4 از مقاله.
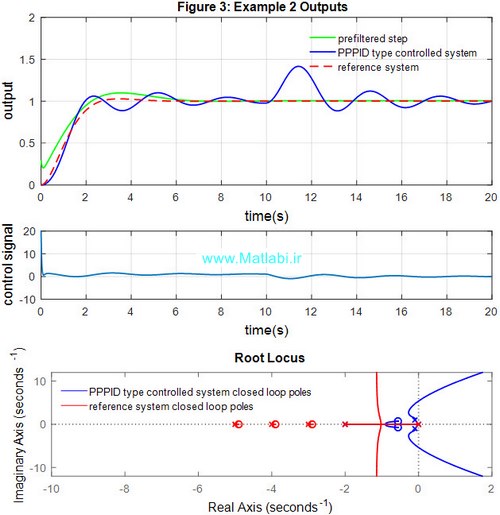
شبیه سازی مثال دوم
در این مثال همانطور که گفته شد، سیستم مرجع برای طراحی کنترلگر عوض شده لذا، کنترلگر و پیش فیلتر ورودی نیز تغییر کردهاند.
نتایج شبیه سازی در زیر آورده شده است که عینا مشابه Figure 5 از مقاله میباشد.
همچنین حد بهره و فاز نیز در این حالت محاسبه شدهاند که مشابه نتایج مقاله عبارتند از:


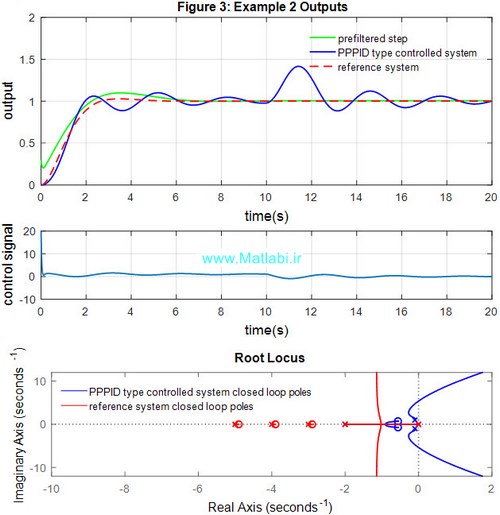
شکل 3‑3. نتایج شبیه سازی مثال 2 و معادل Figure 5 از مقاله.
بنابراین توانستیم به طور کامل به نتایج شبیه سازی مشابه نتایج مقاله دست پیدا کنیم.
نتیجه گیری
در این مقاله مسئله جایابی قطب برای یک کنترلگر نوع ppPID، با روش افزایش تعداد صفرها، انتگرالگیرها و قطبهای PID به منظور شکل دهی پاسخ سیستم و پایداری سیستم حلقه بسته بررسی شد.
چند مثال هم برای نشان دادن روش با نتاج خوب ارائه شد.
این روش برای سیستمهای دارای نوسان زیاد با ردیابی ورودی و دفع اغتشاش مناسب کارآمد خواهد بود.
این کنترلگر قطبهای سیستم را بدون حذف آنها جایابی میکند و همچنین صفرهای سیستم را حذف نمیکند.
همچنین این کنترلگر برای سیستمهای ناپایدار و غیرمینیمم فاز میتواند به کار رود. مقاوم بودن این کنترلگر نیز نشان داده شد.
به طور خلاصه کنترلگر ppPIDt به آسانی طراحی و پیادهسازی میشود و در ردیابی ورودی و دفع اغتشاش بدون اعمال هزینه زیاد در سیگنال کنترلی علاوه بر تضمین پایداری سیستم حلقه بسته، موثر خواهد بود.
همچنین این روش به راحتی در درسهای پایه کنترل ارائه شده است.
کلیدواژه:
شبیه سازی
A Pole Placing PID Type Controller
طبق توضیحات فوق توسط کارشناسان سایت متلبی تهیه شده است و به تعداد محدودی قابل فروش می باشد.
سفارش انجام پروژه مشابه
درصورتیکه این محصول دقیقا مطابق خواسته شما نمی باشد،.
با کلیک بر روی کلید زیر پروژه دلخواه خود را سفارش دهید.






دیدگاهها
هیچ دیدگاهی برای این محصول نوشته نشده است.