توضیحات
A novel particle swarm optimisation approach to detecting continuous, thin and smooth edges in noisy images
یک روش بهینه سازی ازدحام ذرات جدیدی برای تشخیص مستمر لبه ، نازک و صاف در تصاویر پر نویز
توضیحات
برنامه اصلی که باید اجرا شود ، به اسم asli8 نامگذاری شده است.
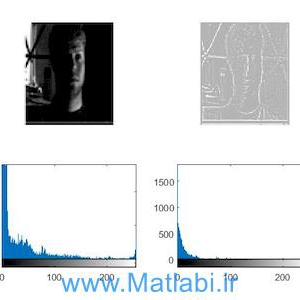
خروجی الگوریتم نیز شامل تصویر لبه تصویر اصلی می باشد.
همچنین ، مقدار معیار PFOM مطابق آنچه در مقاله تعریف شده به ازای نویز مشخص بدست می آید.
مراحل اصلی تشخیص لبه در شکل زیر آورده شده است.

تصویر ورودی می تواند بصورت نویزی ( نویز گوسین) یا سالم باشد.
پس از دریافت تصویر توسط الگوریتم ، دامنه لبه برای هر پیکسل در 8 جهت محاسبه می گردد که بعنوان ورودی الگوریتم PSO دریافت می گردد.
از طرفی دیگر ، ماکزیمم دامنه لبه بعنوان ورودی روش Otsu جهت محاسبه TH می باشد.
TH برای محاسبه تابع هدف نیاز می باشد.
نحوه ی عملکرد الگوریتم برمبنای روش های بهینه سازی نیز در فلوچارت زیر آورده شده است.
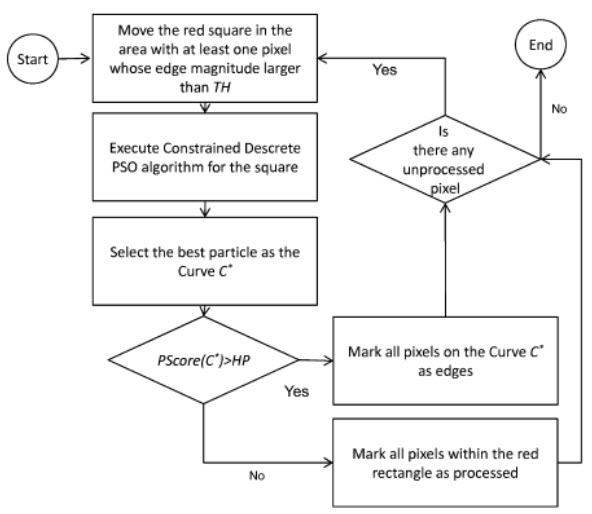
در این مرحله ، ابتدا مربع قرمز نقطه چین در ناحیه ای از عکس قرار می گیرد که حداقل شامل یک پیکسل با اندازه لبه بالا باشد.
سپس ، الگوریتم بهینه سازی به ناحیه انتخاب شده اعمال می گردد تا بهترین منحنی را در این ناحیه بیابد.
در هر اجرای الگوریتم بهینه سازی ، تمامی منحنی های ممکنی که مرکز آنها درون مربع نقطه چین قرار دارند ، تجزیه و تحلیل می گردند.
اگر بهترین منحنی توسط الگوریتم بهینه سازی در این مرحله یافت شود ، تمامی پیکسل های برروی منحنی بعنوان لبه مشخص می شوند ، درغیر اینصورت ، تمامی پیکسل های درون مربع بعنوان پیکسل های بررسی شده ، مشخص می شوند.
این فرآیند تا هنگامیکه تمامی پیکسل های تصویر بررسی شوند ، ادامه می یابد.
فرآیند مهم در الگوریتم های بهینه سازی نحوه ی کد بندی هر جواب ممکن ( لبه که جداکننده دو ناحیه تاریک و روشن می باشد ) در ناحیه مربع قرمز نقطه چین و محاسبه ی تابع تناسب متناظر با آن می باشد.
هر لبه با مرکز لبه و بردارهای دوسمتی مشخص می شود.
برای مثال در شکل زیر مرکز لبه مشخص شده در تصویر در مختصات (3و3) از گوشه ی سمت چپ بالای مربع قرمز خط چین قرار دارد.
طول لبه 11 پیکسل می باشد که یک پیکسل c مرکز لبه و 10 پیکسل دیگر نیز با بردارهایی نشان داده شده اند.

جهت حرکت به پیکسل دیگر با اعداد صفر تا 7 نشان داده می شود.
ژن های 3 تا 7 قسمت بالای منحنی و ژن های 7 تا 12 قسمت پایین منحنی را نشان می دهد.
با تغییر رنج این متغییرها در محدوده ی خود ، تمامی لبه های پیوسته درون نا حیه ای با مساحت را جستجو کند.
تابع هدف و قیود مسئله بهینه سازی نیز بصورت زیر می باشد.

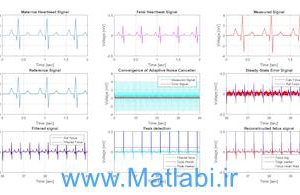
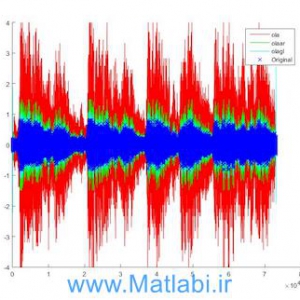
نتیجه بدست آمده از اجرای شبیه سازی با متلب :

کلید واژه :
Edge detection, Particle swarm optimization, Noisy images, Impulsive and Gaussian noise
شبیه سازی
A novel particle swarm optimisation approach to detecting continuous, thin and smooth edges in noisy images
به تعداد محدودی قابل فروش می باشد.
سفارش انجام پروژه مشابه
درصورتیکه این محصول دقیقا مطابق خواسته شما نمی باشد،. با کلیک بر روی کلید زیر پروژه دلخواه خود را سفارش دهید.