

توضیحات
A New Edge Detection Algorithm for Flame Image Processing
ترجمه فارسی موضوع مقاله:
الگوريتم جديد لبه يابي براي پردازش تصاوير آتش و شعله
شبیه سازی در محیط ام فایل متلب انجام شده است.
دارای 1صفحه گزارش فنی که در مورد شبیه سازی توضیح داده شده است.
دارای 6صفحه گزارش که در آن تئوری مسئله به صورت فارسی توضیح داده شده است.
توضیحات پروژه
الگوريتم جديد لبه يابي براي پردازش تصاوير آتش و شعله
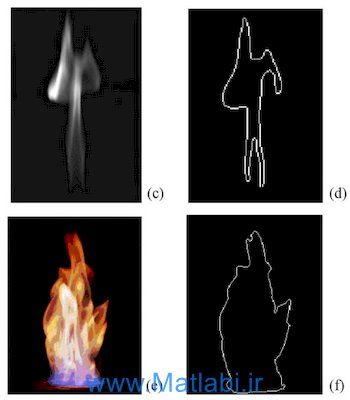
به طور كلي ناحيه شعله شدت روشنايي بيشتري نسبت به پس زمينه اطرافش دارد و مرز بين ناحيه شعله و پس زمينه آن اغلب ممتد و به هم پيوسته است. به علاوه اينكه در بسياري از موارد تنها يك شعله اصلي در تصوير وجود دارد؛ در غير اين صورت مي توان تصوير را طوري قطعه بندي كرد كه هر قطعه ان تنها شامل يك شعله اصلي باشد. بر اين اساس يك تاگوريتم محاسبه كننده ارائه مس شود. استراتژي پايه اين است كه لبه هاي زبر و خشن و زائد در تصوير شعله يافت شده و سپس لبه هاي اصلي شناسايي شوند و لبه هاي نامربوط حذف گردند. اين الگوريتم مي تواند به گام هاي منطقي زير تقسيم شود:
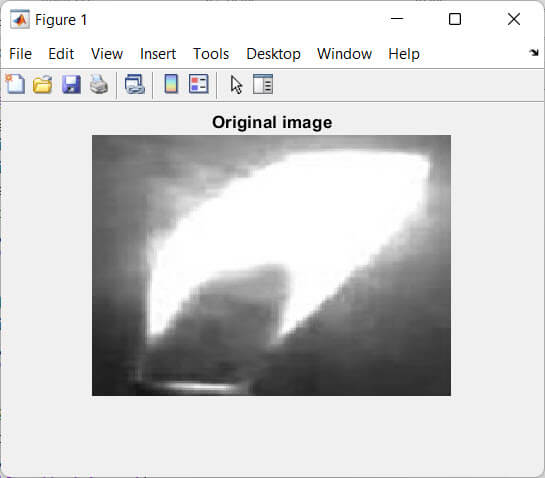
گام 1: تنظيم سطوح خاكستري تصوير شعله
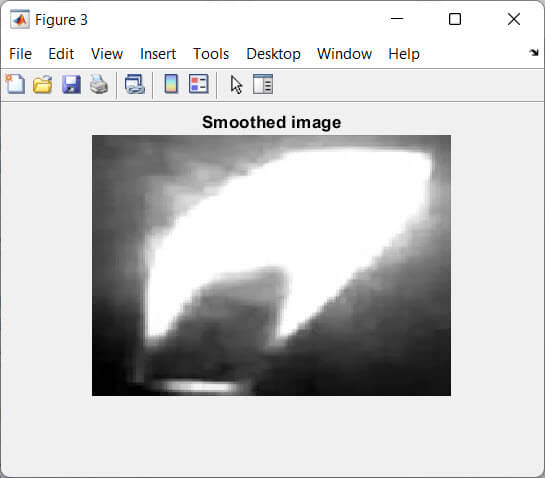
گام 2: نرم كردن تصوير به منظور حذف نويز
گام دوم فيلتر كردن تمامي نويزهاي موجود در تصوير قبل از مكان يابي و كشف هرگونه لبه است. يك فيلتر گاوسي مي تواند با استفاده از يك ماسك ساده به اين مهم دست يابد. الگوريتم smoothing گاوسي با استفاده از متدهاي convolution استاندارد و پس از اينكه يك ماسك مناسب انتخاب گرديد اجرا مي شود. هر چه پهناي ماسك گاوسي وسيع تر باشد حساسيت كشف نويز پس زمينه در تصوير آتش/شعله كمتر مي شود، اما يك ماسك وسيع همچنين ممكن است لبه آتش/شعله يافت شده را به قدري دقيق بسازد كه خطاي محلي سازي در لبه هاي يافت شده در تصوير نيز كمي با پهناي گاوسي افزايش يابند…
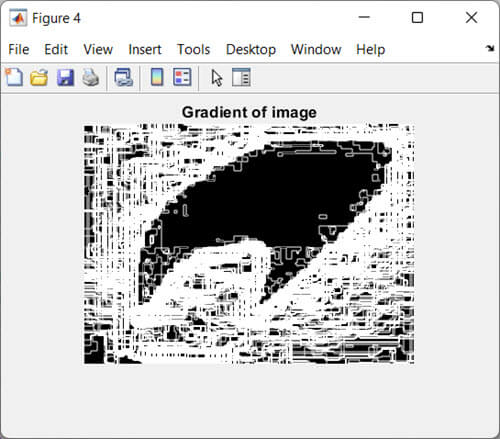
گام 3: به كارگيري عملگر sobel براي يافتن لبه هاي اوليه
يافتن لبه هاي اوليه به وسيله يافتن گراديان (مشتق دوبعدي) همه پيكسل هاي تصوير محقق مي شود به طوري كه نواحي با كنتراست سطح خاكستري بالا در لبه هايشان برجسته مي شوند. سپس الگوريتم، لبه را در طول اين نواحي دنبال مي كند و پيكسل هايي را كه در قله هاي گراديان ها نيستند مي خواباند (صفر مي كند). اگر مقدار بردار گراديان بيشتر از مقدار آستانه بالايي يعني TH باشد ، ان پيكسل يك پيكسل لبه است. علاوه بر اين اگر مقدار بردار گراديان بين دو حد آستانه TH و TL (آستانه پائيني) باشد آنگاه ان پيكسل مفدارش صفر مي شود مگر اينكه مسيري از اين پيكسل به يك پيكسل با مقدار گراديان بالاي TL وجود داشته باشد…
گام 4: تنظيم TH و TL براي نتايج بهتر
مقداردهي اوليه جفت TH و TL بر اساس نتايج پيشين مربوط به تصاوير شعله مشابه و سپس تنظيم مقادير براي نتيجه بهتر در گام 4 انجام مي شود. نتايج بهتر از روي اينكه چه تعداد پيكسل لبه يافت شده است نعيين مي شود يعني هرچه پيكسل هاي لبه بيشتري در تصوير لبه يافت شود، پارامترهاي TH و TL بهتر انتخاب شده اند. يك حد آستانه ديگر به نام TE نيز وجود دارد كه به نحوي تنظيم مي شود كه تعداد كل پيكسل هاي لبه محدود شود؛ يعني اگر تعداد كل پيكسل هاي لبه از مقدار از مقدار TE تجاوز كند، تنظيم خودكار خاتمه پيدا مي كند. تا اينجا يك تصوير مقدماتي با لبه هاب مشخص شده از تصوير شعله اوليه فراهم شده است. اين تصوير بدست آمده را PEI مي ناميم.
گام 5: حذف لبه هاي نامرتبط در PEI (تصوير لبه اوليه)
5-a : هر نقطه لبه در PEI را انتخاب كنيد ، ان نقطه را از PEI حذف كنيد، يك نصوير لبه موقت جديد تخصيص دهيد، و آن نقطه را روي تصوير لبه موقت رسم كنيد.
5-b : نقطه انتخابي را به عنوان مركز به كار گيريد، و در يك ناحيه 3Ï3 به مركز آن نقطه، پيكسل ها را جستجو كنيد. مكان همه پيكسل هاي همسايه اي را كه از نوع پيكسل هاي لبه هستند ذخيره كنيد. در پيكسل هاي همسايگي هشتگانه، عمليات براي سه حالت زير اتخاذ مي شود:
- اگر هيچ پيكسل همسايه اي وجود ندارد، نقطه انتخابي يك نقطه منفرد بوده و بايستي از PEI حذف شود. جستجو را خاتمه داده و به گام 5-d برويد.
- اگر تنها يك پيكسل همسايه وجود دارد، نقطه انتخابي يك نقطه انتهايي است. لذا اين نقطه بايستي از PEI حذف شده و روي تصوير لبه ي موقت، رسم گردد، و نيز باستي به ليست نقاط انتهايي افزوده شود. حال جستجوي جديد را از همسايه يافت شده شروع كنيد و به گام 5-c برويد.
- اگر دو يا بيشتر از دو تا پيكسل همسايه وجود دارد، نقطه انتخابي يك نقطه انتقال معمولي در يك خط لبه است يا يك فصل مشترك با بيش از سه انشعاب در لبه مي باشد. يكي از نقاط همسايه را به عنوان مركز جستجوي جديد تنظيم نموده و جستجوي جديد را آغاز كنيد. ديگر موقعيت هاي همسايه را به عنوان نقاط اتصال چك نشده ذخيره كنيد و سپس به گام 5-b برگرديد.
شكل 3 نشان مي دهد كه چگونه اگر كه مركز جستجوي قبلي توسط يك مركز جستجوي جديد جايگزين شود اين گام به پيش مي رود. براي مثالف در تصوير سمت چپ شكل 3 ، پيكسل 5 مركز انتخابي است. فرض كنيد كه يك ننقطه لبه در پيكسل 9 يافت شود، انگاه پيكسل 5 از PEI حذف شده و در تصوير لبه موقت ، رسم مي گردد، و پيكسل 9 مركز جستجوي جديد خواهد بود. در اين روش ، جستجو ، پيكسل به پيكسل پيش مي رود..
5-c : نقاط اتصال را چك كنيد. اگر تمامي نقاط اتصال به عنوان مركز، جستجو شده اند، يك تصوير لبه موقت تكميل شده است. حال طول هر دو نقطه انتهايي در تصوير لبه موقت را محاسبه كنيد و طولاني ترين آنها را گزينش كنيد و سپس به گام 5-d برويد.
5-d : اگر همه پيكسل هاي موجود در PEI به تصوير لبه موقت منتقل شده اند آنگاه به گام 6 برو.
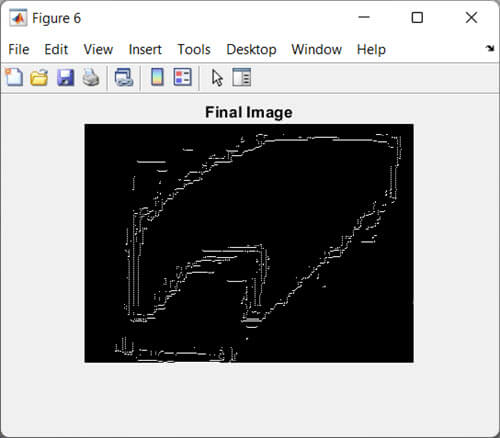
گام 6: دست يافتن به يك لبه به وضوح مشخص
پيكسل هاي طولاني ترين لبه در تصوير لبه نهايي را كه بايستي سايز يكساني با تصوير اوليه داشته باشد انتخاب كنيد. فلوچارت تمامي پردازش ها در شكل 4 نشان داده شده است.
این پروژه برای درس های پردازش تصویر و سیگنال مناسب است.
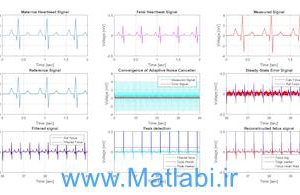
در بخش گالری این محصول, نتایج شبیه سازی قرار گرفته است.
- تشخيص لبه در تصاوير ديجيتال با استفاده از تكنيك فازی
- Novel Fuzzy logic Based Edge Detection Technique
- Edge Detection using Fuzzy Logic in Matlab
- تشخیص زن یا مرد بودن با پردازش تصویر در متلب و Avr
- آموزش حذف نويز تصوير با استفاده از جعبه ابزار ويولت (waveletmenu)
کلید واژه : پردازش تصویر، لبه یابی، شعله، آتش، استخراج ویژگی، تشخیص شکل
image processing; combustion, edge detection, feature extraction, fire, flame, image edge analysis, monitoring, shape measurement
توجه: جهت دریافت شبیه سازی مقاله با متلب باید این محصول را خریداری نمایید.
شبیه سازی مقاله الگوريتم جديد لبه يابي براي پردازش تصاوير آتش و شعله
A New Edge Detection Algorithm for Flame Image Processing
به تعداد محدودی قابل فروش می باشد.
سفارش انجام پروژه مشابه
درصورتیکه این محصول دقیقا مطابق خواسته شما نمی باشد،. با کلیک بر روی کلید زیر پروژه دلخواه خود را سفارش دهید.