توضیحات
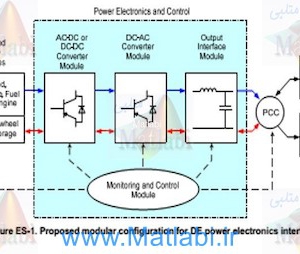
A Control Strategy for a Distributed Generation Unit in Grid-Connected and Autonomous Modes of Operation
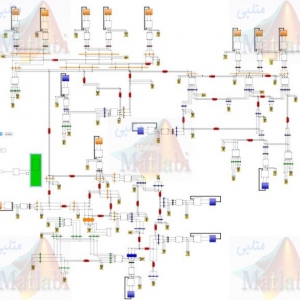
شبیه سازی در محیط سیمولینک متلب انجام شده است.
دارای گزارش ورد 21 صفحه ای است.
بخشی از گزارش شبیهسازی
مقدمه
شبیه سازی با نرم افزار متلب ورژن 2017b انجام شده است.
پوشه شبیهسازی حاوی یک m فایل با نام Data است.
این کد حاوی دادههای ورودی است که با ران شبیهسازی به صورت خودکار فراخوانی و ذخیره میشود.
شبیه سازی دقیقا مطابق مقاله انجام شدهاست.
در مقاله 6 حالت مختلف مطالعه و شبیهسازی شده که این حالتها به صورت جداگانه تنظیم و ذخیره شدهاست.
به عنوان مثال، Case_1 مربوط به حالت شبیهسازی اول بوده و Case_2 نیز مربوط به حالت دوم میباشد.
این موضوع در بخش نتایج به صورت کاملتر توضیح داده شدهاست.
در ادامه شبیهسازی به صورت کامل و جزء به جزء توضیح داده شدهاست.
با توجه به شبیه بودن شبیهسازیها به هم، توضیحات کلی برای تمام شبیهسازیهای صادق است.
توضیحات مربوط به شبیه سازی در اینجا نیامده است.
نتایج شبیهسازی
همانطور که توضیح داده شد، شبیهسازی مانند مقاله برای شش حالت مختلف انجام شده و به صورت جداگانه با نام Case_1 الی Case_6 ذخیره شدهاست.
برای نمایش خروجیهای هر حالت، تنها کافی است هر یک از این حالتها ران شود.
در پایان شبیهسازی، متغیرهایی که در مقاله برای هر حالت نشان داده شده، به صورت خودکار پلات میشود.
در ادامه جزئیات و نتایج هر حالت توضیح داده شدهاست.
3-1- حالت 1
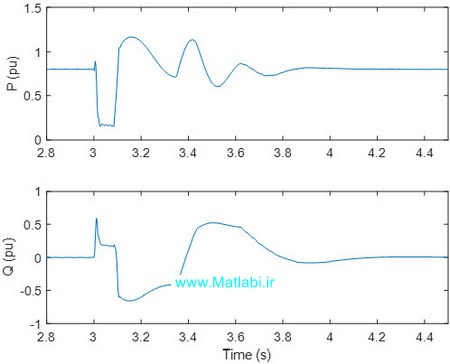
در این حالت ریزشبکه در حالت متصل به شبکه با مقدار توان اکتیو و راکتیو مرجع 0.8 و صفر مشغول به کار است.
در زمان 3 ثانیه توان اکتیو مرجع افزایش یافته و برابر 1 پریونیت میشود.
در ادامه نیز در زمان 4 ثانیه مقدار توان راکتیو مرجع نیز افزایش یافته و برابر 0.2 میشود.
برای این حالت توان اکتیو و راکتیو تولید پراکنده در شکل 7 نشان داده شدهاست.
بر اساس شکل 7 مشخص است مقادیر مرجع به صورت دقیق و با سرعت بالا محقق شدهاست.
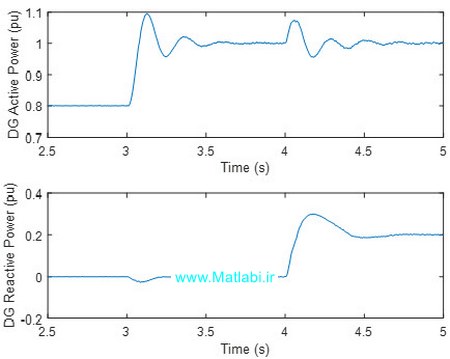
شکل 7. توان اکتیو و راکتیو تولید پراکنده در حالت 1
3-2- حالت 2
این حالت برای ارزیابی قابلیت گذر از خطای سیستم مطالعه شدهاست.
در این سناریو، ریزشبکه در حالت متصل به شبکه بوده و یک خطای سه فاز به زمین در نقطه PCC رخ میدهد.
خطای مذکور 5 سیکل یعنی 0.083 ثانیه طول کشیده و رفع میشود.
برای این حالت، نتایج شبیهسازی در شکلهای 8 الی 10 نشان داده شدهاست.
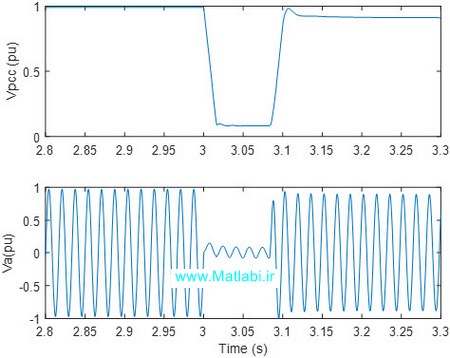
بر اساس شکل 8 مشخص است که در زمان خطا، ولتاژ نقطه PCC افت کرده و نزدیک به صفر شدهاست.
همچنین مشخص است که بعد از رفع خطا، ولتاژ سریعا بازیابی شدهاست.
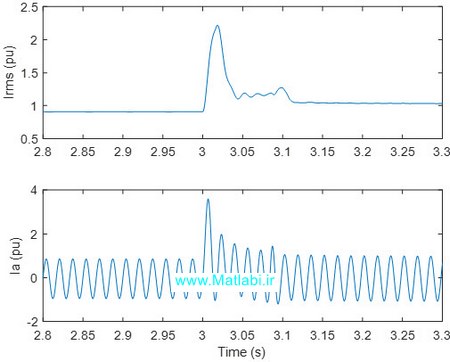
بر اساس شکل 9 مشخص است که در زمان خطا، دامنه جریان در حدود 2 پریونیت بوده است.
این موضوع نشان میدهد که سیستم کنترلی مورد نظر قادر به محدودسازی جریان در زمان خطا میباشد.
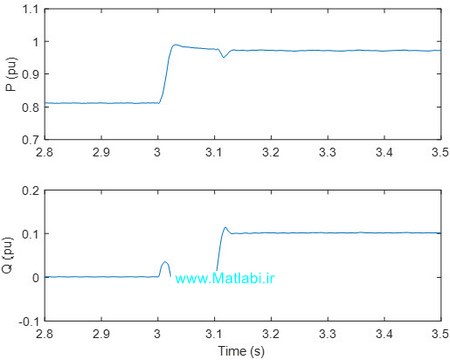
بر اساس شکل 10 نیز مشخص است که در مدت کوتاهی پس از رفع خطا، توان DG به حالت ماندگار رسیده است که پایداری مناسب سیستم را نشان میدهد.
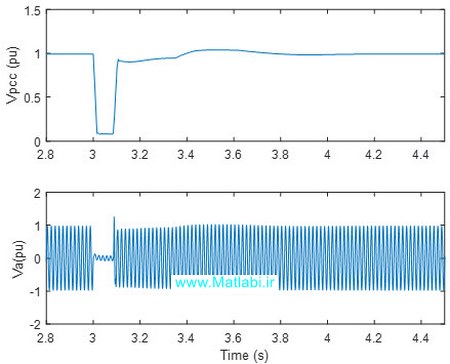
شکل 8. دامنه ولتاژ نقطه PCC و ولتاژ لحظهای فاز A برای حالت 2
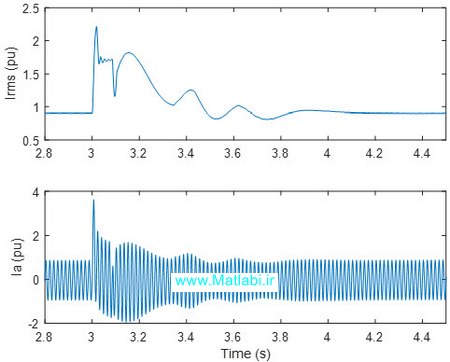
شکل 9. دامنه جریان اینورتر و جریان لحظهای فاز A اینورتر برای حالت 2
شکل 10. توان اکتیو و راکتیو تولید پراکنده در حالت 2
3-3- حالت سوم
در این حالت فرض شدهاست که از زمان 3 تا 4 ثانیه، دامنه ولتاژ شبکه به اندازه 0.2 پریونیت افت کرده و برابر 0.8 پریونیت میشود.
بعد از ثانیه 4، افت ولتاژ شبکه برطرف میشود. برای این حالت، نتایج در شکلهای 11 الی 13 نشان داده شدهاست.
بر اساس شکل 11 مشخص است که افت ولتاژ شبکه موجب افت ولتاژ در نقطه PCC نیز شدهاست.
مطابق شکل 12 مشخص است که افت ولتاژ شبکه موجب افزایش جریان تولید پراکنده شدهاست.
این موضوع منطقی است زیرا با افت ولتاژ شبکه، ولتاژ نقطه PCC نیز افت میکند.
بنابراین برای اینکه توان تزریقی DG ثابت باقی بماند، با افت ولتاژ، باید جریان اینورتر افزایش یابد.
بر اساس شکل 12 مشخص است که با وجود افت ولتاژ، توان تزریقی DG تقریبا ثابت باقی ماندهاست.
همچنین مشخص است که بعد از هر تغییر، متغیرهای سیستم سریعا به حالت ماندگار رسیدهاند.
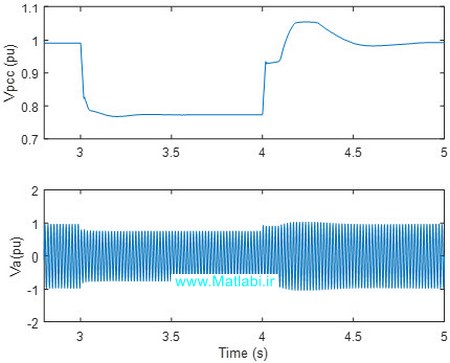
شکل 11. دامنه ولتاژ نقطه PCC و ولتاژ لحظهای فاز A برای حالت 3
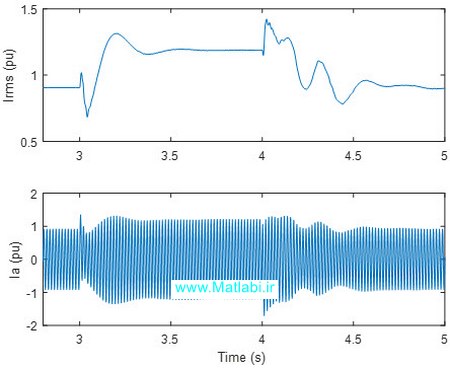
شکل 12. دامنه جریان اینورتر و جریان لحظهای فاز A اینورتر برای حالت 3
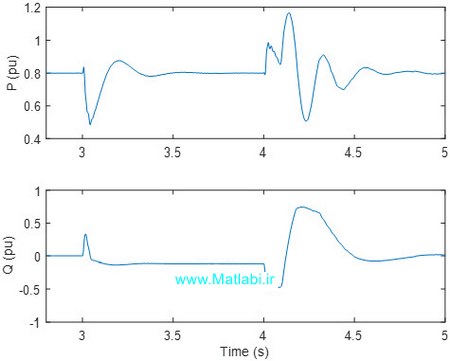
شکل 13. توان اکتیو و راکتیو تولید پراکنده در حالت 3
3-4- حالت چهارم
در این حالت، ریزشبکه در ابتدا در حالت متصل به شبکه بوده و در زمان 3 ثانیه به حالت جزیرهای میرود.
برای این حالت، در شکل 14 دامنه ولتاژ نقطه PCC و همچنین مقدار لحظهای ولتاژ فاز A نشان داده شدهاست.
بر اساس این شکل مشخص است که پس از جزیرهای شدن ریزشبکه، دامنه ولتاژ نقطه PCC به تدریج کاهش یافته و به کمتر از 0.5 پریونیت رسیده است.
افت ولتاژ موجب میشود که دامنه ولتاژ از استانداردهای جدول (1) مقاله تخدی کرده و جزیرهای شدن تشخیص داده شود.
همچنین مشخص است که بلافاصه پس از تشخیص جزیرهای شدن در زمان 3.25 ثانیه، مقدار ولتاژ نقطه PCC سریعا بازیابی شده و به نزدیکی یک پریونیت رسیده است.
بر اساس شکل 15 نیز مشخص است که جزیرهای شدن در مدت بسیار کمی پس از وقوع آن تشخیص داده میشود.
شکل 14. دامنه ولتاژ نقطه PCC و ولتاژ لحظهای فاز A برای حالت 4
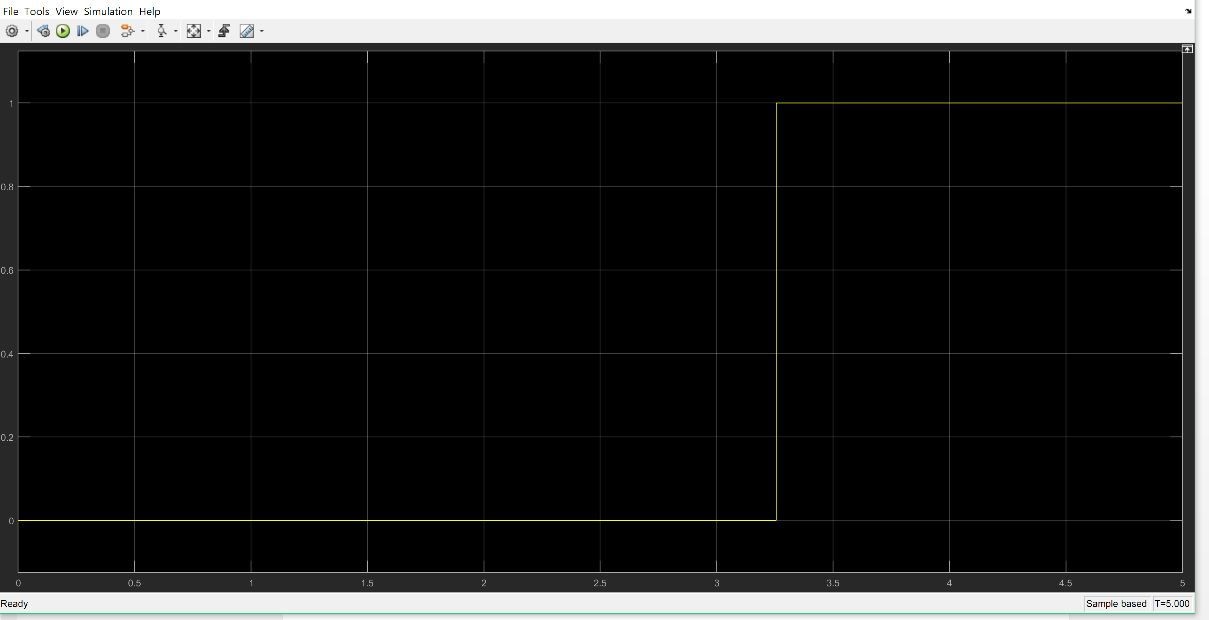
شکل 15. سیگنال تشخیص جزیرهای شدن (T) برای حالت 4
3-5- حالت پنج
در این حالت، وقوع خطا در سمت شبکه بررسی شدهاست.
برای این کار فرض شده است که یک خطای سه فاز به زمین در سمت شبکه و در زمان 3 ثانیه رخ میدهد.
5 سیکل بعد یعنی در زمان 3.083 ثانیه، ریزشبکه از شبکه اصلی جدا شده و به حالت جزیرهای میرود.
برای این حالت، نتایج شبیهسازی در شکل 16 و 17 نشان داده شدهاست.
بر اساس شکل 16 مشخص است که بلافاصله پس از جزیرهای شدن ریزشبکه در زمان 3.083، ولتاژ ریزشبکه از طریق DG بازیابی شده و تقریبا برابر یک پریونیت میشود.
بر اساس شکل 17 نیز مشخص است که در زمان خطا، دامنه جریان تنها در حدود 2 پریونیت افزایش یافته که نشان دهندهی این است که روش کنترلی قادر به محدودسازی جریان خطا میباشد.
شکل 16. دامنه ولتاژ نقطه PCC و ولتاژ لحظهای فاز A برای حالت 5
شکل 17. دامنه جریان اینورتر و جریان لحظهای فاز A اینورتر برای حالت 5
3-6- حالت 6
در این حالت تاثیر تغییرات بار بررسی شدهاست.
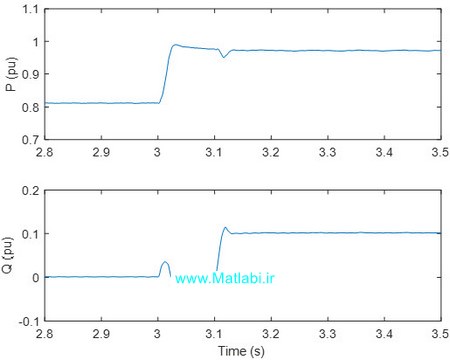
برای این کار، در زمان 3 ثانیه بار اکتیو به میزان 0.2 پریونیت و در زمان 3.1 ثانیه نیز بار راکتیو به میزان 0.1 پریونیت افزایش یافتهاست.
نتایج ین حالت نیز در شکلهای 18 و 19 نشان داده شدهاست.
بر اساس شکل 18 مشخص است که در زمان 3 ثانیه با افزایش بار اکتیو، توان راکتیو تزریقی DG نیز افزایش یافتهاست.
همچنین در زمان 3.1 ثانیه نیز با افزایش بار راکتیو، توان راکتیو تزریقی DG نیز افزایش یافتهاست.
بر اساس شکل 19 مشخص است که با وجود تغییرات بار، فرکانس به صورت مطلوب کنترل شده و در محدوده مقدار نامی باقی ماندهاست.
با این وجود افزایش بار اکتیو موجب کاهش نسبی فرکانس شده است که علت این موضوع، کنترل افتی موجود در سیستم کنترلی میباشد.
بر اساس شکل 19 همچنین مشخص است که افزایش توان راکتیو موجب افت ولتاژ شده است که باز هم به دلیل استفاده از کنترل افتی بوده و طبیعی است.
شکل 18. توان اکتیو و راکتیو DG در حالت 6
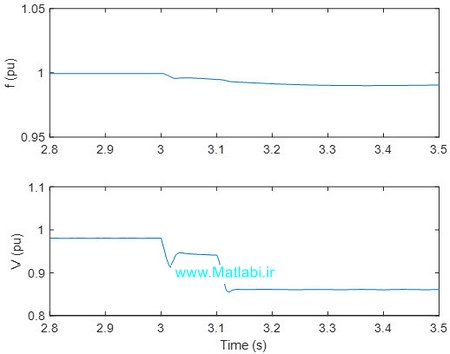
شکل 19. فرکانس نقطه PCC (شکل بالا) و دامنه ولتاژ نقطه PCC (شکل پایین)
توضیحات تکمیلی
یکی از نکاتی که لازم به توضیح دارد، فراخوانی خودکار m فایل Data و همچنین پلات خودکار شکلها پس از پایان شبیهسازی است.
برای این کار از کدنویسی در بخش Model Properties است که از مسیر زیر باز میشود.
با باز کردن این بخش، گزینهها به صورت شکل 21 نمایان میشود.
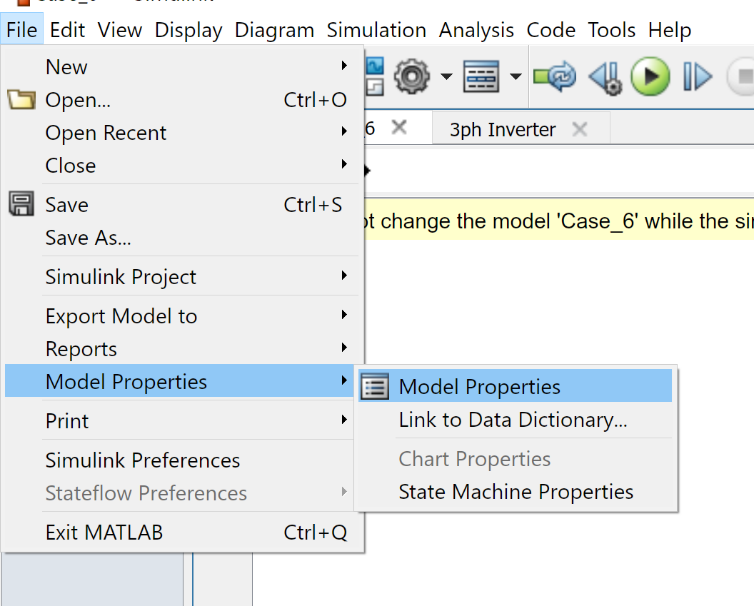
شکل 20. مسیر باز کردن Model Properties
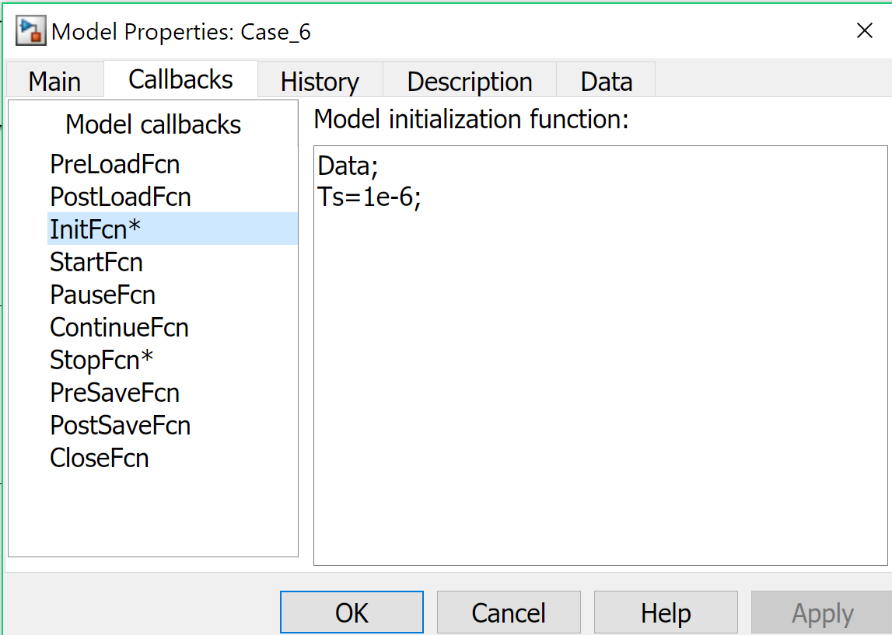
شکل 21. گزینههای Model Properties
بر اساس شکل 21، ما با بخش Callbacks کار داریم. در این بخش کدهایی که در InitFcn نوشته شود پیش از ران سیمولینک به صورت خودکار فراخوانی میشود. بنابراین در این بخش پریود نمونهگیری Ts تعریف شده و کد Data نیز فراخوانی شدهاست.
همچنین کدهایی که در بخش StopFcn نوشته شود، پس از پایان شبیهسازی فراخونی میشود. بنابراین متغیرهایی که باید در پایان شبیهسازی پلات شود با استفاده از دستور plot در StopFcn کدنویسی شدهاست. توجه شود که برای پلات کردن متغیرها، لازم است این متغیرها با استفاده از بلوک To Workspace در فضای عمومی متلب ذخیره شوند که این کار مثلا برای توان تولید پراکنده یعنی P به صورت ![]() انجام شدهاست.
انجام شدهاست.
کلیدواژه:
Autonomous operation, distributed generation (DG), islanding detection, ride-through capability, small-signal analysis, voltage-controlled voltage-sourced converter (VC-VSC)
شبیه سازی
A Control Strategy for a Distributed Generation Unit in Grid-Connected and Autonomous Modes of Operation
توسط کارشناسان سایت متلبی تهیه شده است و به تعداد محدودی قابل فروش می باشد.
سفارش انجام پروژه مشابه
درصورتیکه این محصول دقیقا مطابق خواسته شما نمی باشد،.
با کلیک بر روی کلید زیر پروژه دلخواه خود را سفارش دهید.


دیدگاهها
هیچ دیدگاهی برای این محصول نوشته نشده است.